
资料下载


带Pixy和Nerf枪的自动炮塔
陈敏
分享资料个
描述
使用自动炮塔项目,您可以自动追踪并向敌人开火!该项目使用 Pixy 相机模块、RobotGeek 平移/倾斜底座、泡沫飞镖枪和 Geekduino 来协调组件。Pixy 可以“教”识别不同的颜色,当它“看到”具有匹配颜色的对象时,它会将数据发送到 Geekduino。然后 Geekduino 将移动平移和倾斜伺服系统,使物体位于 Pixy 视野的中心。如果物体静止不动的时间过长,泡沫飞镖枪就会启动,向物体发射飞镖!
第 1 步:项目零件清单
这个项目是几个 RobotGeek 套件的组合。每个部分都是完成该套件所必需的,因为它是在本指南中制作的。
- 1 x泡沫飞镖枪套件
如果您想构建这个项目并且您已经有一个 Arduino/Geekduino 板,您可以使用带有伺服系统的Robot Geek Pan and Tilt Kit ,而不是 RobotGeek Desktop RoboTurret。您应该拿起一个传感器屏蔽,以便更轻松、更安全地接线。
第 2 步:入门
您应该已经阅读了每个套件的入门指南并运行了测试代码。如果您还没有完成这些,请按照以下链接的指南进行操作,并在完成后返回此处获取进一步说明。
Pixy 入门指南将引导您获取最新固件,这是运行本指南中可用的 Arduino 代码版本所必需的。
第 3 步:组装
您应该按照入门指南组装套件。如果没有,请使用此处的链接按照每个套件的组装说明进行操作。完成这些后,请返回此处获取进一步说明。
您将构建 Pixy 安装组件概述中选项 1 中所示的 Pixy 安装,将其连接到伺服侧安装支架。将炮塔与飞镖枪组装好后,使用 4 x M2*6 螺栓将带侧支架的 Pixy 安装座连接到触发伺服系统,相机方向倒置。这将相机放置在尽可能靠近枪管的位置,同时为相机的 USB 和色带连接器留出足够的空间。
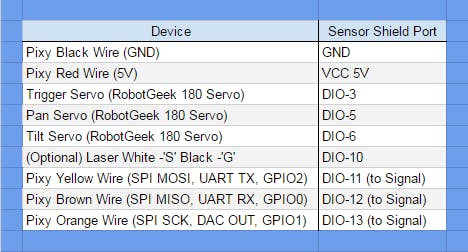
第 4 步:接线
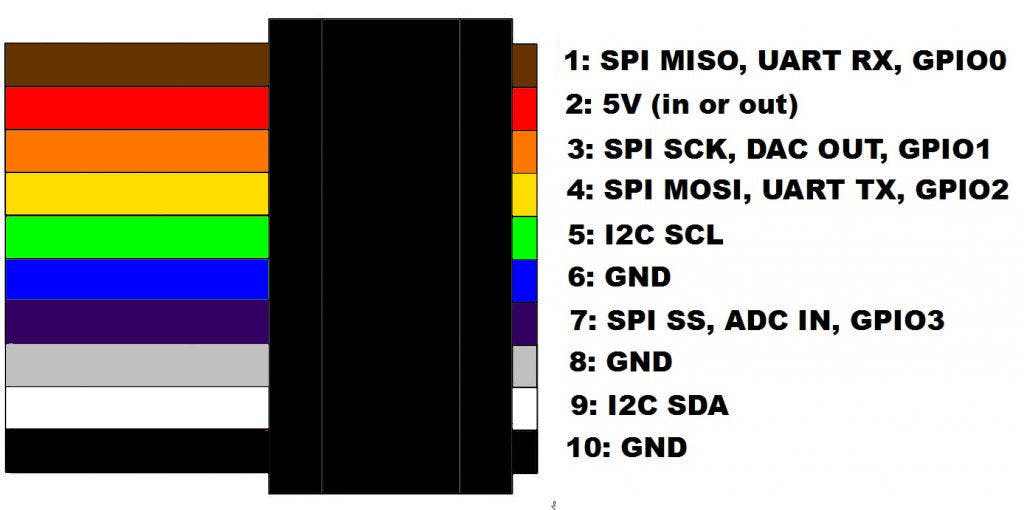
我们将使用 Pixy 的分线电缆来连接这个项目。
请注意,并非 Pixy 分支电缆上的所有电线都用于此项目,因此您会遇到一些电线混乱。电缆扎带可用于管理此问题。
使用 Sensor Shield 接线时,请注意您的跳线。请注意,顶部跳线设置为 VIN。这允许您的电路板直接从电源向您的伺服系统供电。
您也可以使用云台套件、泡沫飞镖枪套件、Pixy、面包板、跨接电缆和排针在没有传感器屏蔽的情况下进行接线。
请注意,我们已将 VIN 插入面包板上的电压轨。这对我们的伺服系统非常有用。在任何情况下都不要将任何 5V 设备插入此导轨。这样做可能会对您的设备造成不可逆转的损坏。
第 5 步:带有飞镖枪和 Pixy 代码的 Arduino 炮塔
您可以在此处下载代码草图:
将代码提取到您的 Arduino 速写本文件夹中。您可以roboTurret3_dartGun_Pixy.ino 在以下位置找到:
File -> Sketchbook -> desktopRoboTurretV3 -> roboTurret3_dartGun_Pixy
现在将草图加载到您的 Geekduino 上。如果一切都正确连接,伺服系统将移动到原始位置(中心)。
第 6 步:运行代码
- 使用 6V 电源插入您的炮塔。所有的舵机都应该移动到原始位置(中心)。
- 按住 Pixy 上的白色按钮,直到前面的 LED 变为红色。松开按钮,找到您希望炮塔跟踪的颜色的对象,并将其放在 Pixy 的相机前。再次按下白色按钮以锁定该颜色。
- 您的炮塔现在应该正在跟踪该颜色。它可能会在训练后不久尝试开火。
- 为安全起见,请拔下炮塔。通过拉动枪的柱塞直到其卡入到位,然后在枪膛中放置一个飞镖来装载你的炮塔。不要直视房间。
- 重新插入炮塔,准备移动!炮塔处于活动状态,已装载,并准备好追捕您训练过的任何颜色。
如果您想查看串行监视器上发生的情况,您可以将 Geekduino 插入计算机的 USB 端口进行此过程。您还可以通过 USB 插入您的 Pixy 并观看它使用PixyMon跟踪您的对象。
第 7 步:更进一步
所以现在你应该有一个追踪颜色的自动炮塔。此时你能做什么?很多!
- 你可以做一个游戏!通过为第二支 Nerf 枪配备您想要追踪的颜色的盾牌和一些 FSR,您可以让您的反应与机器人的准确性相抗衡!
- 通过一些代码更改和一个电位器,您可以设置机器人手动触发之前的时间延迟。
- 你能用多发子弹的枪来完成这项工作吗?有一行代码允许触发器在解除之前触发一定次数。
- 也许添加一个蜂鸣器和 LED 来指示炮塔的模式是值得的?
- 如果您想变得危险(并使我们免受伤害),此代码将根据您的硬件进行一些小的修改,您可以使用它为自动彩弹炮塔提供动力,以进行一些极端的彩弹比赛。
最重要的是,你应该做一些你喜欢的事情,并通过 Arduino 编程获得乐趣!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





