
资料下载


Arduino带锯锯片张力计
梁宏满
分享资料个
描述
设置正确的刀片张力并不容易。带锯是锯的天后!如果张力太小,锯片开始颤动,切口变得不干净,需要额外打磨。如果张力过高,则会降低刀片的使用寿命。剩下什么?每次都反复尝试,直到找到正确的设置?谷歌搜索带来了希望。我并不孤单。有很多用于更换、对齐和张紧刀片的技巧。
一个最受关注的技巧是调整张力,使刀片听起来像在低音吉他上弹奏的“E”。废话——不幸的是,我家里没有贝斯吉他来进行现场试验(空气吉他也不够用)。幸运的是我的女儿有一个键盘,我可以听一个“E”。不幸的是,这对我一点帮助都没有。我可能还不够音乐!
从技术角度来看,刀片张力最终必须是可测量的。在另一次谷歌搜索之后,很明显这是真的,一个好的设置是在 250 – 300 N/mm² 之间。不幸的是,正确的测量设备并不便宜。它的成本约为 300 欧元!这对我来说太多了。这些测量装置以机械方式工作,并且可能显示线性膨胀。因此,外壳由金属制成,并且必须非常精确地制造。我必须有另一种解决方案。所以只是以某种方式测量力并用微控制器评估它?
FSR – 力感应电阻器
一种方法是使用 FSR(力感应电阻器)测量力。它们由聚合物厚膜 (PTF) 组成,随着施加在活性表面上的力的增加,电阻会降低。FSR 不适用于称重传感器或应变仪等精密测量。然而,它们仍然很便宜,大约 5 欧元并且易于使用。
这种方法的唯一缺点是不能像使用专业设备那样测量绝对力。必须首先确定合适的刀片张力作为模板。
建造房屋
在 FSR 的第一次测量实验明确后,一个条件就是一个好的外壳。在这里,成本不应失控。这就是我选择 3D 打印变体的原因。
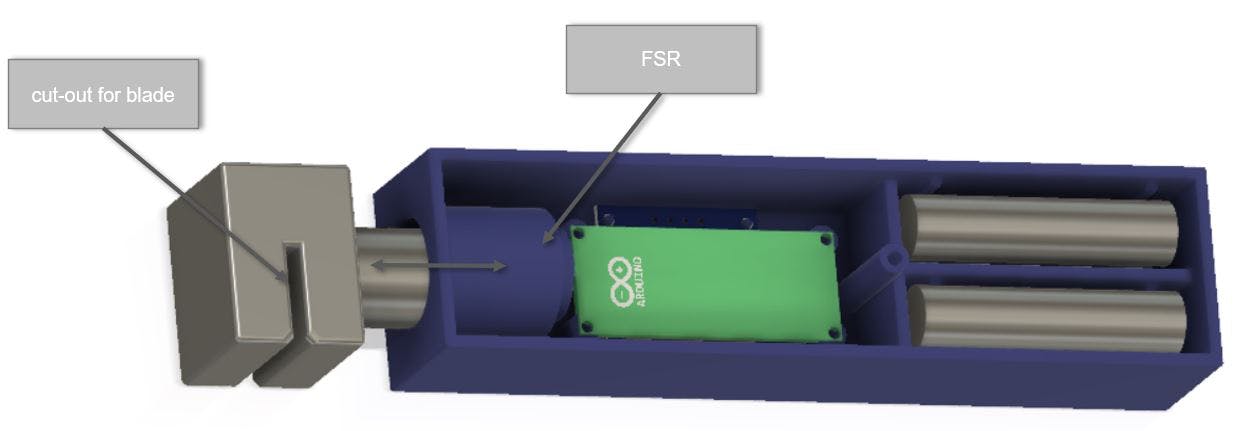
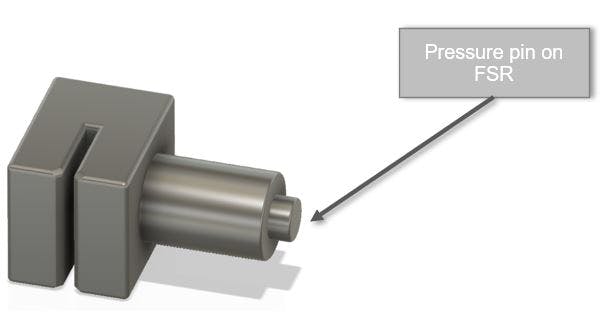
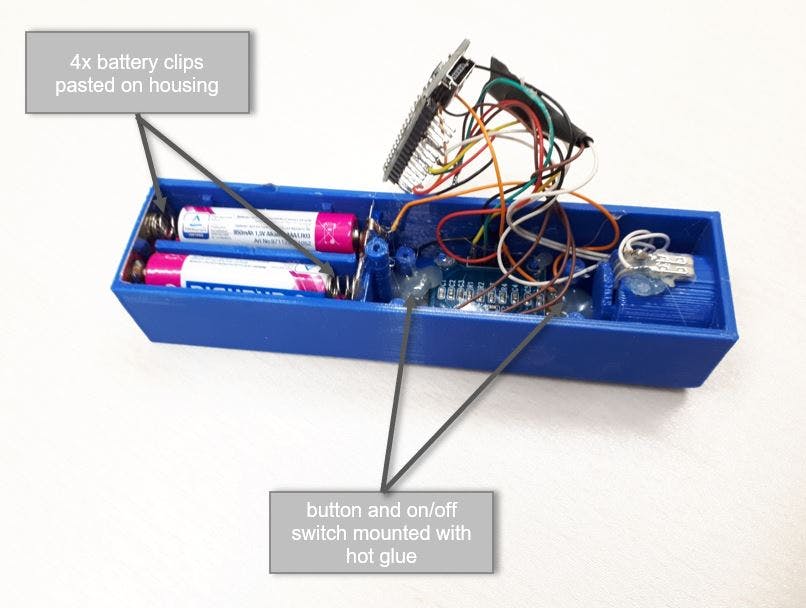
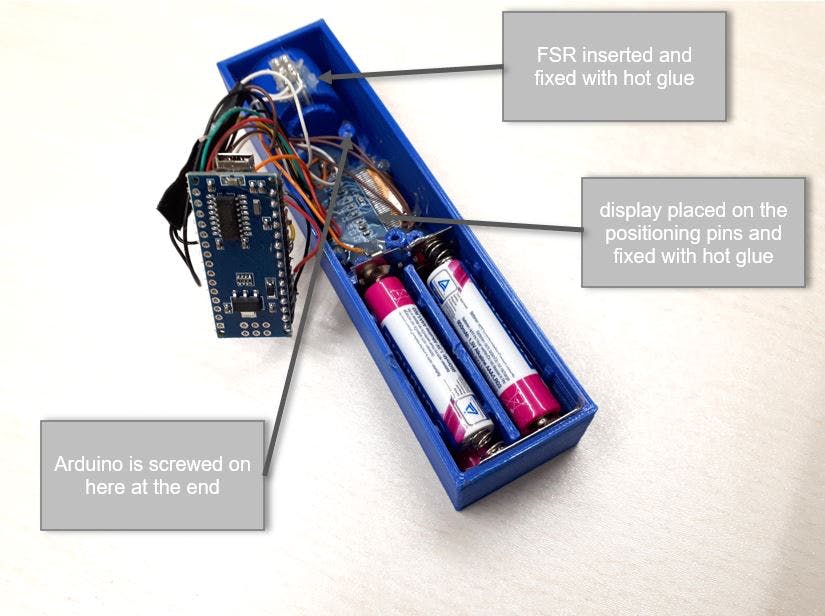
在左侧,松散地插入了用于锯带的可移动支架。它推动了 FSR 上的一个引脚。FSR 安装在机箱中。
在外壳内,一个 Arduino Nano 工作。它以其小尺寸运行良好,并接管了 FSR 数据的测量和评估。它由四节 AAA 电池供电。
显示刀片张力
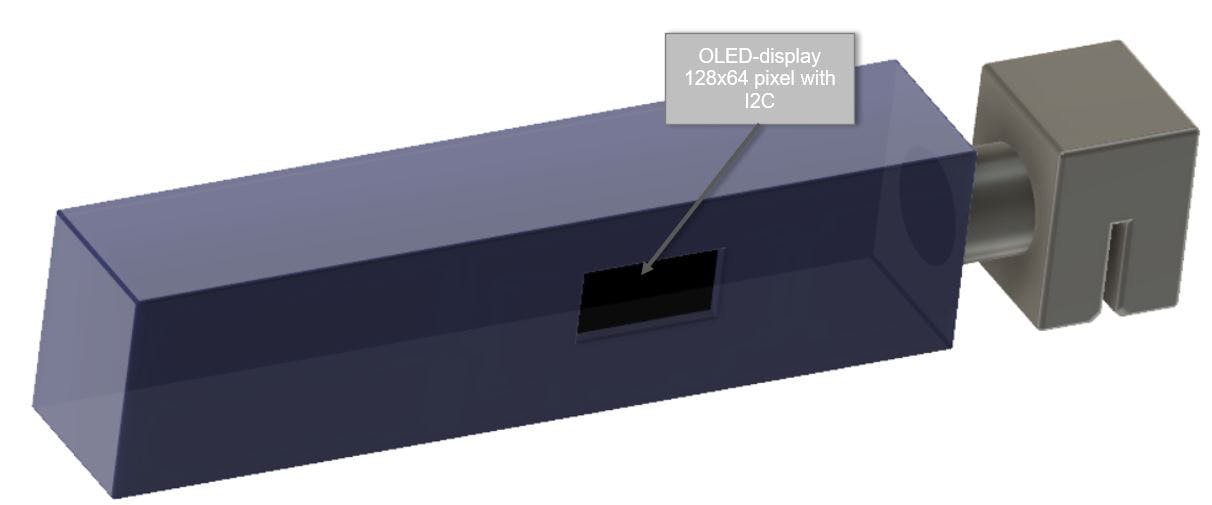
刀片张力显示器也必须显示其测量值。非常适合这一点的是非常小的 0.96 英寸 128 × 64 像素显示器。可以通过 I2C 连接到 Arduino。而且价格也非常低。
显示器直接安装在 Arduino Nano 下方的外壳中。这样通过 Arduino 的连接就可以在没有大环路和电缆混乱的情况下安装。
显示器旁边有一个按钮和显示器的开/关开关。
成分
刀片张力测量装置由以下部件组成:
- Arduino纳米
- 力感应电阻 FSR 5 kg
- 0.96" 128 × 64 像素显示器,带 I2C 端口
- 按钮(6 × 6 毫米)
- 开/关
- 电源 4 节 AAA 电池和连接夹
- 2 个电阻 10 kOhm
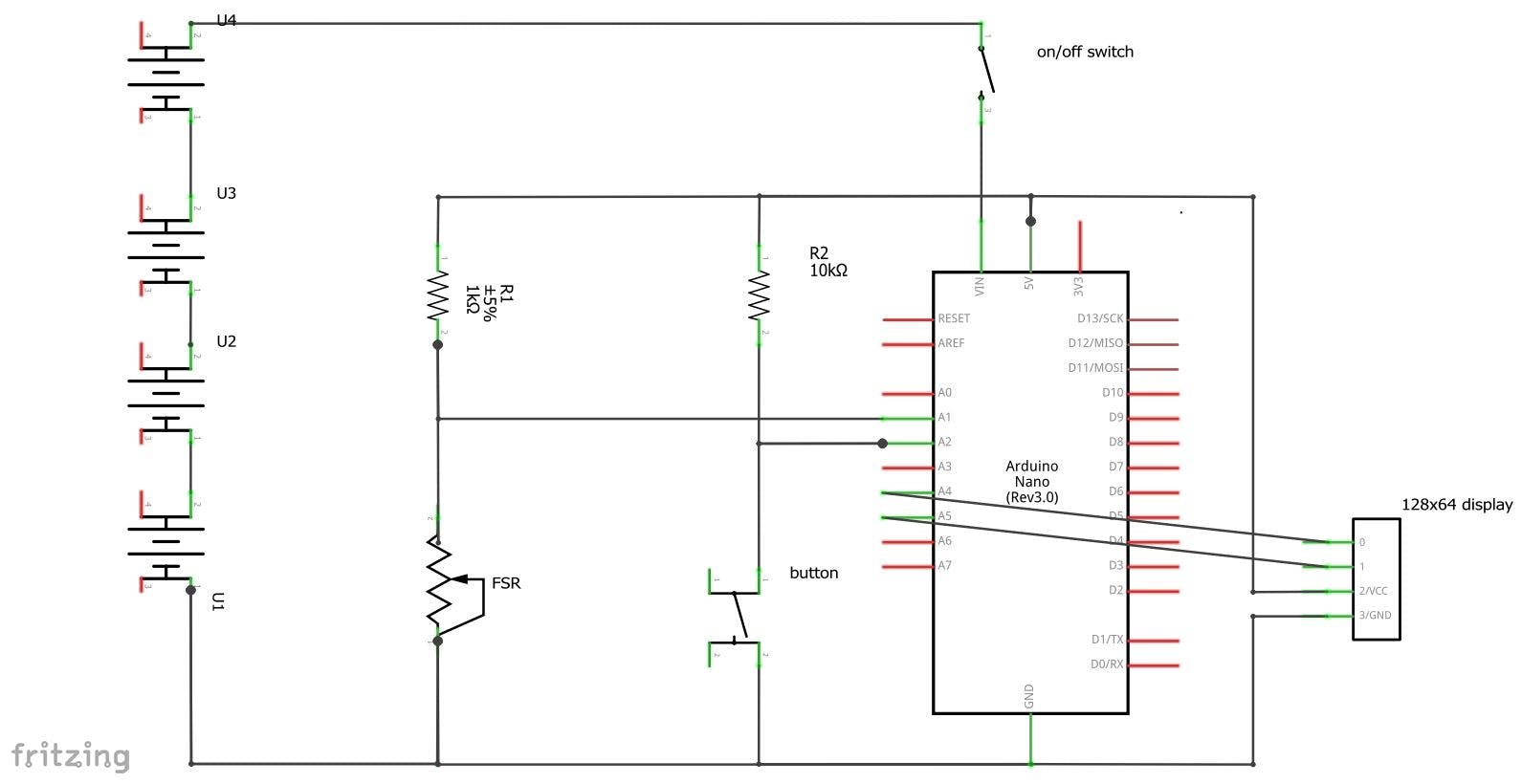
FSR 通过一个 10k 下拉电阻连接到引脚 A1。128 × 64 显示器的 4 个引脚(SCL、SDA、VCC 和 GND)直接连接到 Arduino。该按钮还通过一个下拉电阻连接到引脚 A2。
I2C 显示器与 Arduino Nano 建立了这种连接:
- 地 - 地
- VCC - 5V
- SDA-A5
- SCL - A4
集会
组装大约需要 2 个小时。按照这个顺序,一切顺利:
- 将电缆焊接到开/关按钮并用热胶固定按钮
- 胶水和焊接按钮的方法相同
- 插入显示器并将电缆焊接到显示器上,棒也是用热胶
- 将所有电线焊接到 Arduino Nano 并添加上拉电阻
- 将 FSR 推入测量端口并用热胶粘合,然后将电线焊接到 Arduino
- 然后在外壳上添加带有液体胶水的电池夹,并将 + 连接到 Arduino VIN 和 - 连接到 GND
- 穿上Arduino Nano并用小螺丝固定
- 测试一下
- 然后用一个螺丝盖上盖子
仪表的功能
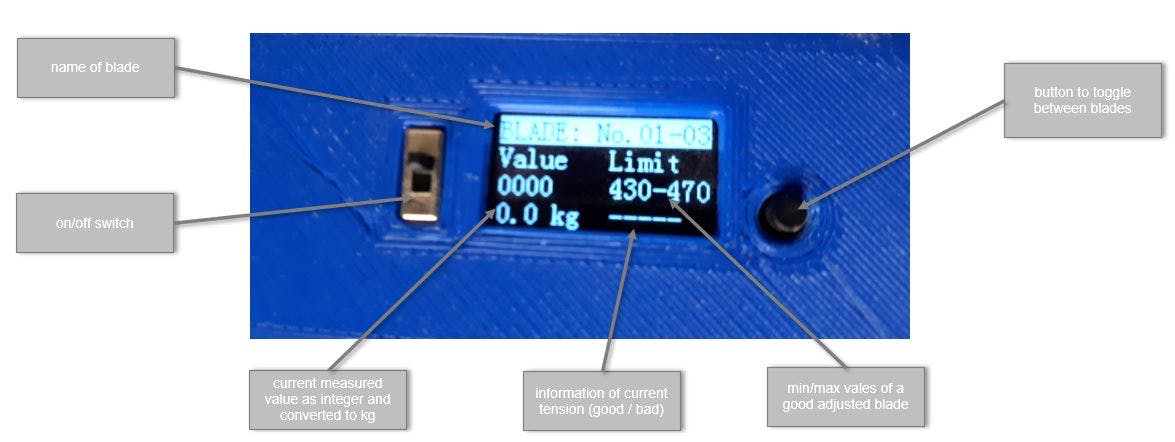
打开 Arduino Nano 后,立即开始测量力感应电阻器上的力。测量值每秒更新一次并显示在屏幕上。
Arduino 的模数转换器将 FSR 的模拟读数表示为 0 到 1023 之间的一个数字。为了更好地估计这个数字,将以千克为单位显示和转换。
使用按钮,您可以在不同的锯片之间切换。接下来可以在 Arduino 草图中添加单个锯片(带有名称、最小和最大限制)。
如何测量刀片张力?做到这四个步骤。
- 像往常一样更换锯片并对齐。定位带锯(或其他工具)的纵向导向

- 将张力计放在纵向导向和左带锯中心之间。张力计的支架应缓慢而轻松地滑入锯片。

- 在测量装置的底部和纵向导轨之间引入一个距离垫片。一个好的值是 5 毫米(取决于 FSR)。使锯片被拉伸定义。
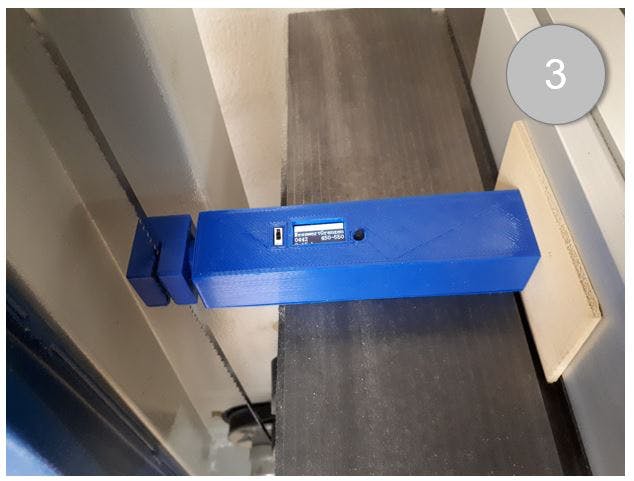
- 读取设备上的测量值。最多等待 10 到 20 秒,直到建立一个恒定值。根据测量值,现在必须放松或增加刀片张力。然后可以进行新的测量。

编码 Arduino 草图
Arduino 草图使用库lcdgfx Alexey Dynda 与显示器进行通信。因此,必须先下载并设置它。
#include "lcdgfx.h"
DisplaySSD1306_128x64_I2C display(-1);
//DisplaySSD1306_128x64_SPI display(-1,{-1, 0, 1, 0, -1, -1); // Use this line for nano pi (RST not used, 0=CE, gpio1=D/C)
//DisplaySSD1306_128x64_SPI display(3,{-1, 4, 5, 0,-1,-1}); // Use this line for Atmega328p (3=RST, 4=CE, 5=D/C)
//DisplaySSD1306_128x64_SPI display(24,{-1, 0, 23, 0,-1,-1}); // Use this line for Raspberry (gpio24=RST, 0=CE, gpio23=D/C)
//DisplaySSD1306_128x64_SPI display(22,{-1, 5, 21, 0,-1,-1}); // Use this line for ESP32 (VSPI) (gpio22=RST, gpio5=CE for VSPI, gpio21=D/C)
// composite_video_128x64_mono_init(); // Use this line for ESP32 with Composite video support
在设置部分,定义了 FSR 和按钮的两个输入引脚,并使用 Font8×16 准备显示。
void setup()
{
Serial.begin(9600);
pinMode(fsrPin, INPUT);
pinMode(buttonPin, INPUT);
display.setFixedFont(ssd1306xled_font8x16);
display.begin();
display.clear();
}
在程序部分循环中,每秒测量一次力。按下按钮时,锯片的存储设置在限值之间更改。但以后更多。
设置最大力
在 Arduino Sketch 中,力的测量值被转换为重量。这意味着功率显示准确,可能会确定最好的尝试。
在本例中,传感器的最大作用力为 5 kg。传感器在 3.3 V 电压下工作。这些对应于大约 5 kg。在电路图中是用分压器和5V进行的。使用 3.3 V 作为最大电压时,这将无法准确工作。可以改进转换,但如果有一个测试重量 - 最好是 5 kg - 确定显示的结果。测量的最大值可以在 Arduino 草图中指定。
float fsrMax = 5.0; //Maximum (measured) value of FSR in Kilogramm
执行功能测试
不幸的是,这种张力计不能测量绝对值。所以我们必须设置一个完美的安装刀片并从中获得测量的力。这对于我们使用的每种刀片类型都是必要的。这是用我的带锯进行的一系列测量。
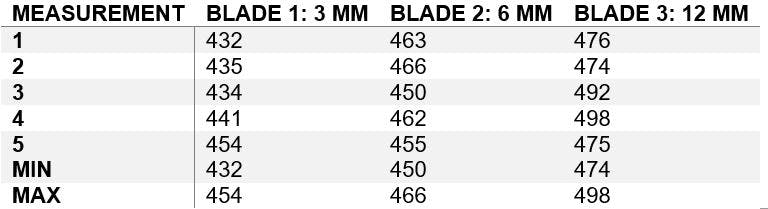
设置限制
从实验中可以清楚地看出最佳张紧锯片必须具有的限制。在我选择的 5 毫米垫片中,刀片的范围很窄。一组最佳锯片的确定限制可以存放在 Arduino 草图中。每个刀片都有一个名称和一个最小值和最大值。
这与变量BladeName[]、bladeMin[]、bladeMax[]一起存储在草图中。
对于我的锯子和刀片,我已经从我的测试中设置了这些值。

它们也存储在 Arduino 草图中。
String bladeName[4] = {"No.01-03mm","No.02-06mm","No.03-12mm","No.04-16mm"};
int bladeMin[4] = { 430, 450, 470, 470};
int bladeMax[4] = { 470, 470, 510, 510};
在对张力计进行了所有测试之后,我需要特别是对于我最喜欢的刀片,6 毫米宽,没有太多帮助。我很好奇这会如何寻找未来的下一个变化,以及我的张力计有什么好的服务。
因此,带锯条的设置不再与音乐有任何关系!
有趣的是,这是错误的!FSR 开发的绊脚石可以追溯到 Fleetwood Mac 的 Mick Fleetwood。他在 1980 年代中期为他的电子鼓寻找传感器,但没有找到。这是与朋友一起开发力感应电阻器的开始。所以,锯带的张力在某种程度上仍然是一个音乐主题。
您始终可以在techpluscode.de上下载当前版本。
用张力计玩得开心!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






