
资料下载


胶合板无人机开源设计
刘燕
分享资料个
描述
我想用激光切割胶合板制作四旋翼框架原型。这也是我第一次尝试从头开始制作无人机(后来添加了用于飞行中镜头/基本航拍的运动相机)。遵循完整的设计流程——概念设计、推重比计算、重量/成本预算、CAD 等
CAD装配
使用 AutoDesk Fusion360 为激光切割 DXF 文件设计零件。我选择的材料是 3 毫米胶合板。受http://www.shendrones.com/booboo的启发,各个部分组合在一起。各部分说明如下:
- 机箱上部 x 1
- 底盘下部 x 1
- 电机垫 x 4
- 腿 x 4
- 转子臂 x 8

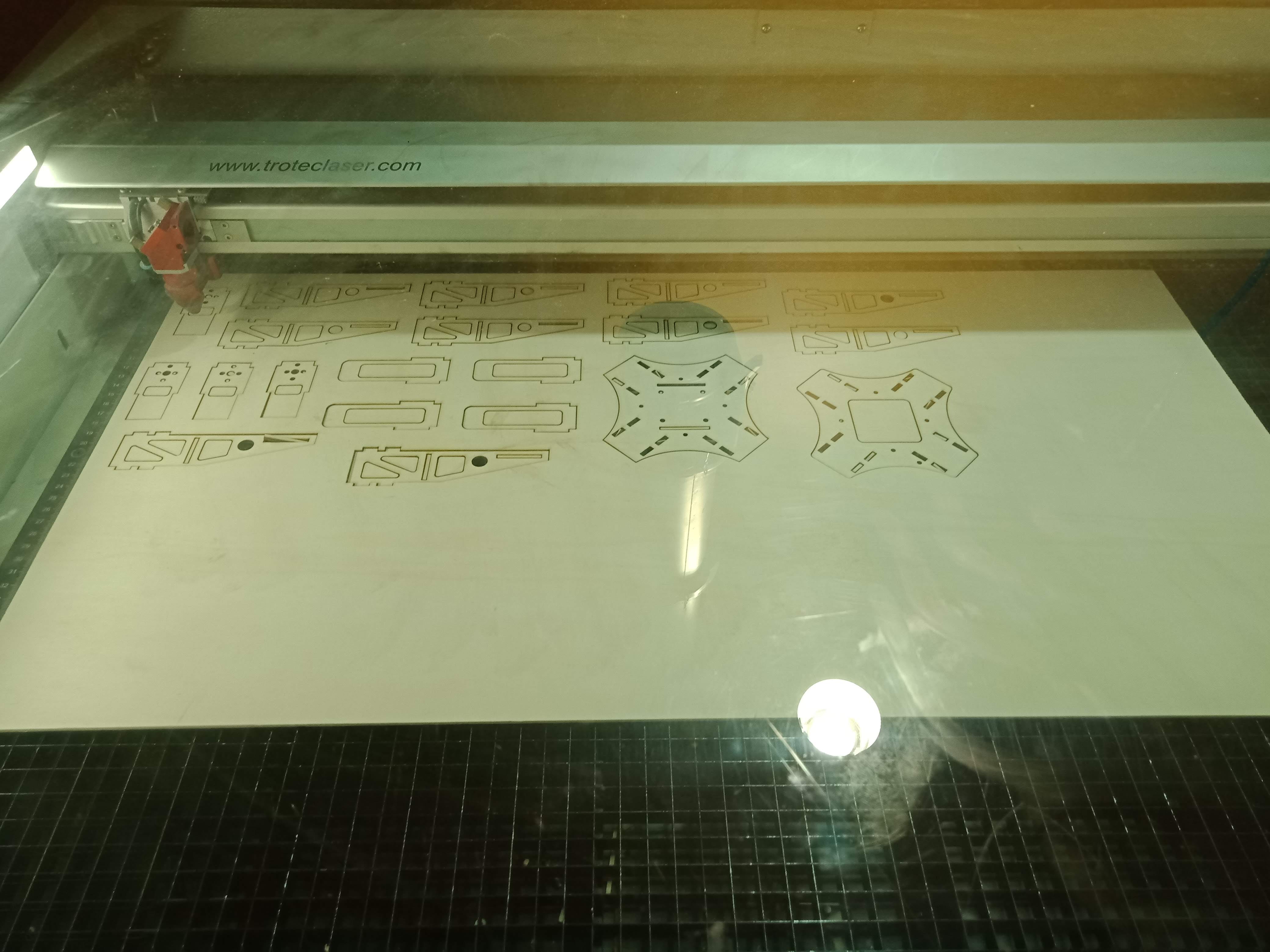
制造
然后将 CAD 文件转换为 DXF,供大学激光切割机使用
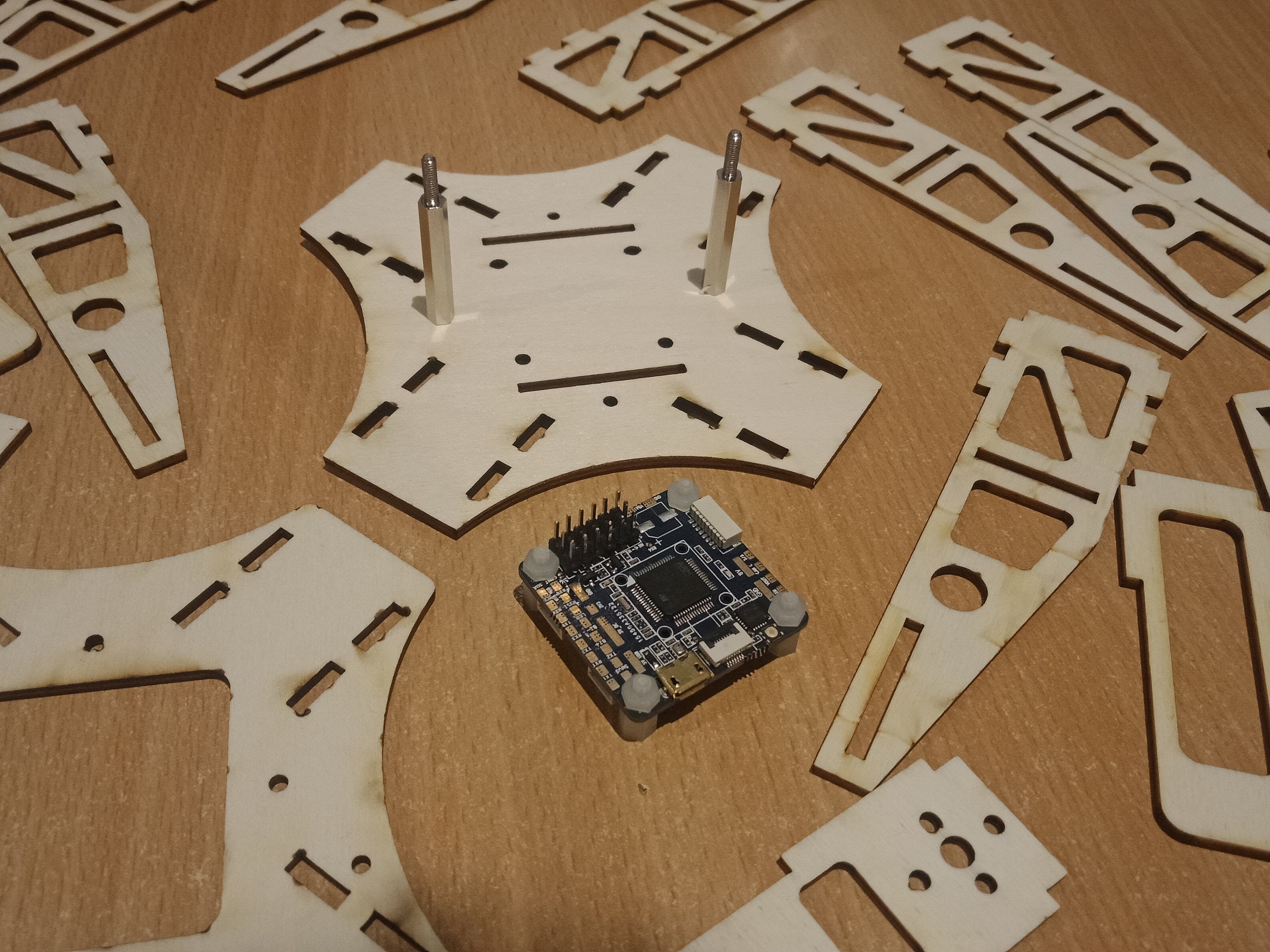
集会
无人机的组装需要一些紧固件(只有 4 个支架和防震架硬件),并具有通常的飞行控制器占用空间。其余的用木胶粘在一起。

元件选择
成功(且可飞行)的四旋翼飞行器的一个主要部分是推重比,它本质上是衡量无人机悬停和保持机动能力的指标。对于航空摄影平台,2:1 的推重比就足够了。我的计算说明如下:
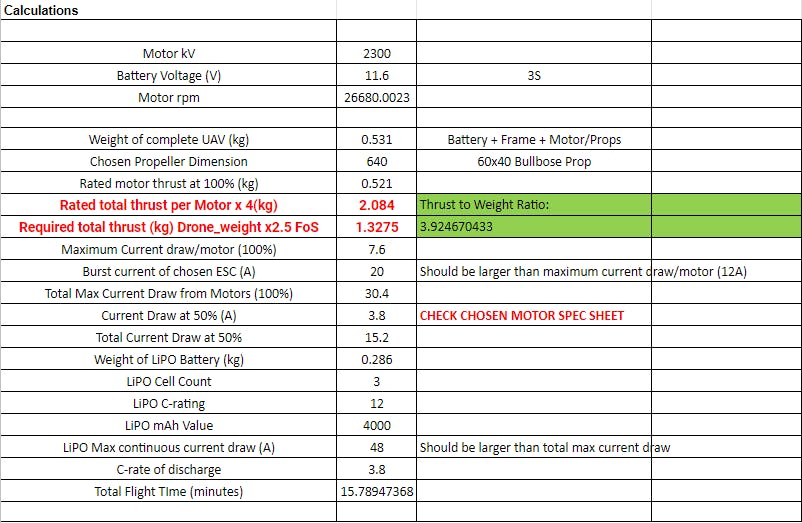
整架无人机的重量(电池、拼装框架、电机+道具)被发现为0.531公斤。
根据我的电机规格表,BE1806 2300kV 电机在 100% 油门时提供 0.521kg 的推力。
因此在 100% 油门时总可用推力为 4 x 0.521kg = 2.084kg
要悬停,最小可用推力应为 0.531kg,因此可用推力为 2.084 / 0.521 = 3.9。这意味着推重比为 3.90,这将是一架非常敏捷的无人机。
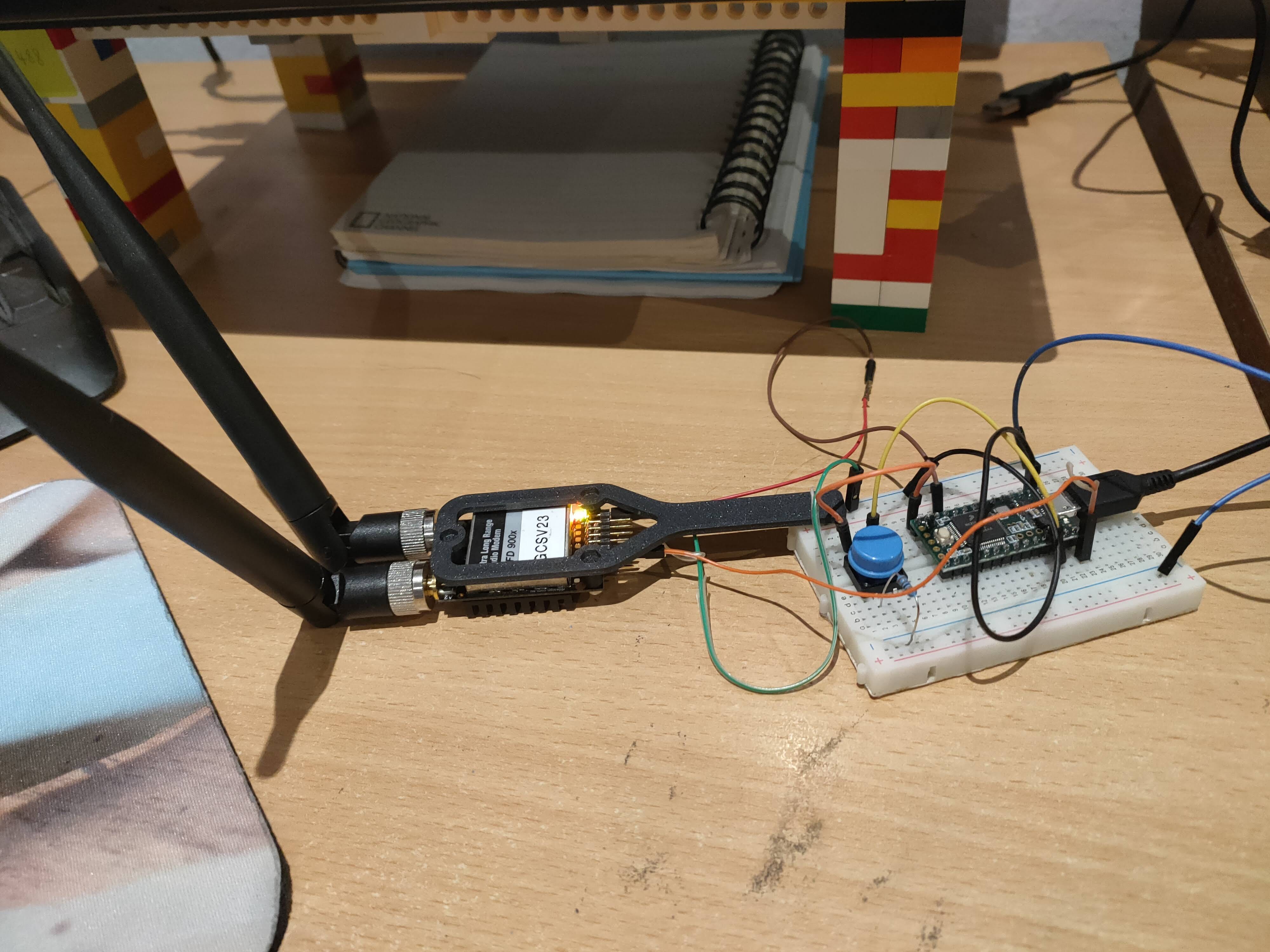
飞行测试装置
飞行发射器是 FlySky FS-i6 (https://www.flysky-cn.com/fsi6)。我没有使用提供的 FS-iA6B 接收器,而是决定使用支持 iBus 的 FlySky FS-X6B 接收器 (https://img.banggood.com/file/products/20160924022953FS-X6B%20Receiver%20User%20Manual.pdf) 来面向未来的设计。
使用 Turnigy 4000 mAh 3S LiPO 飞行时间约为 12 分钟


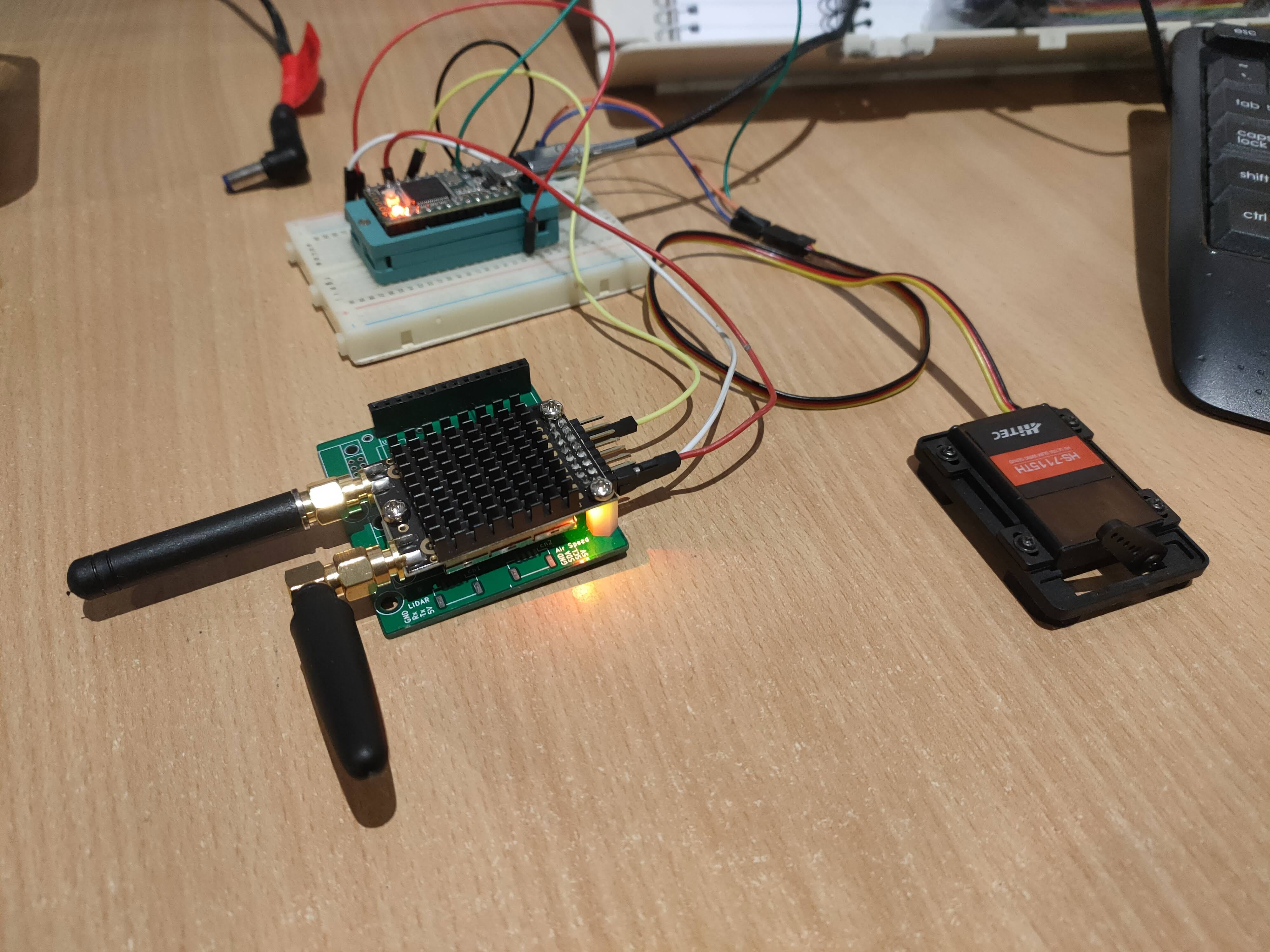
故障安全设计
由于四旋翼框架的脆弱性,我还测试了一个故障安全系统,该系统可用于部署小型降落伞,使用机载 Teensy/RFD900 设置 - 作为该无人机的另一个功能(仍在进行中......)
无人机飞行控制器设置
我决定使用的飞行控制软件是 Betaflight。这使我能够设置 PID 调整参数、iBUS 设置和 ESC 校准/设置。陀螺仪方向和 IMU 放置的大部分基本设置都遵循 https://blog.dronerest.com/omnibus-f4-v6-flight-controller-guide/
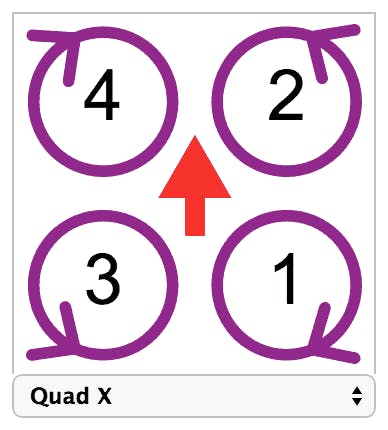
电机/电调设置
电机配置是 X 框架四旋翼的传统 Betaflight 方法。ESC 校准和方向更改通过 Blheli 配置完成 (https://chrome.google.com/webstore/detail/blheli-configurator/mejfjggmbnocnfibbibmoogocnjbcjnk?hl=en)
- 电机 1 和 2 为 CW(从上方看)
- 电机 2 和 3 为逆时针(从上方看)
飞行模式
将使用的主要飞行模式是“稳定”模式。我还设置了一个开关作为“武装开关”
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





