
资料下载


自动送货无人机开源分享
李辉
分享资料个
描述
继续使用 MissionPlanner 和 MATLAB 研究自主飞行。
无人机的主要优势在于无人机可以去到人或车辆难以到达的地方,例如高层建筑、狭窄的街道、障碍物的道路等。但是无人机最重要的结果是可能是他们可以限制面对面的接触,从而减少被新病毒污染的机会。通过取代由人类执行的平凡任务,它们也可以证明是一种节省时间和劳动力的解决方案。无人机可以携带相机、扬声器,甚至是小件必需品,比如杂货、药品、消毒产品,甚至是需要签署的文件。
零件清单写在上面或按照说明获取有关所需零件的其他信息,但请确保您拥有以下所有信息:
一个框架
数据库
电机 x4
螺旋桨 x4
电调 x4
飞行控制器
GPS/GNSS 天线和电源模块
树莓派 3B
发射机
电池
电池充电器
香蕉接头
微型 SD 卡
无线路由器
支座/垫片。
确保您拥有所有列出的部件,但对于完整且详细的部件,我建议您使用 hovergames 套件以成功构建。
硬件硬件

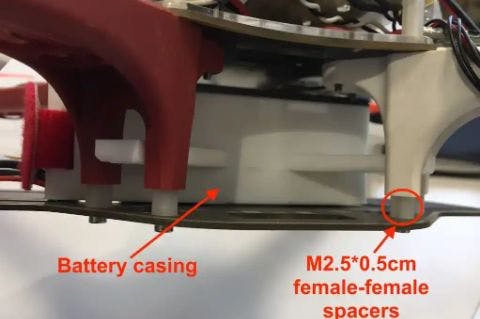
硬件和搭建阶段:组装F450四旋翼机身和中间的印刷电池外壳(确保添加M2.5*5mm垫片)
将电机连接到框架上。

将香蕉连接器焊接到 ESC 和电机线。

将 ESC 和电源模块焊接到 PDB。注意:确保不要使用 PDB 的 5V 输出(它不会提供足够的电力)。
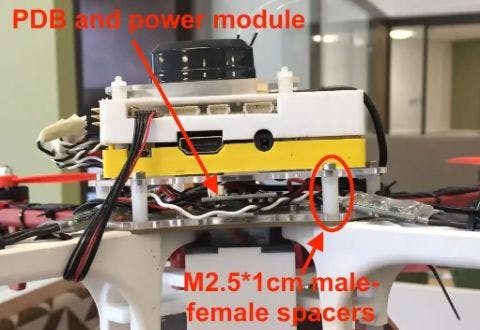
使用 M2.5*10mm 公母垫片在 F450 框架顶部添加第一个激光切割层;并将 PDB 和电源模块附加到该层。注意:确保放置组件,使电线足够长,可以到达所有电机。
将 ESC 连接到电机并使用束线带将电线固定到框架上。将飞行控制器连接到 Raspberry Pi 并将其放入印刷外壳中。在第一层的顶部添加第二个激光切割层,并使用双面粘性垫连接覆盆子外壳。
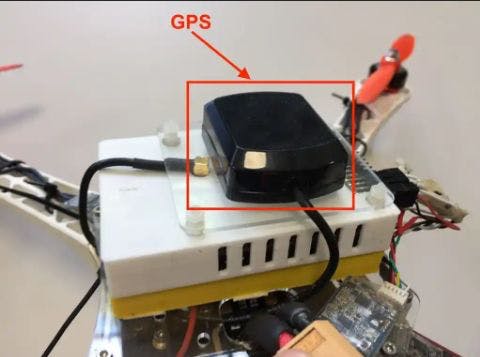
GPS 可以粘在外壳的顶部,但是在这里它被放置在另一个第三层上,如图所示,它位于飞行控制器外壳的顶部,但这完全取决于建造它的人。然后只需将 GPS 连接到飞行控制器。
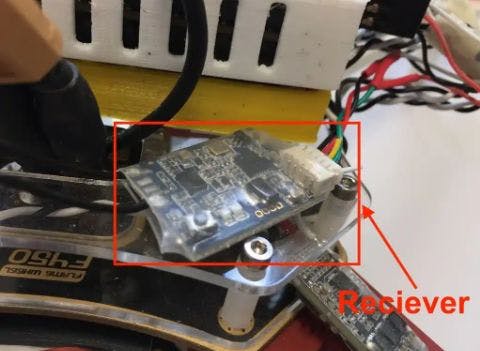
使用双面粘性垫将接收器固定在第二层的顶部。将 ESC 和接收器线连接到飞行控制器引脚。接收器占据第一列引脚,然后电机占据接下来的四列。注意:无人机的前部由先安装哪个电机决定。无论您选择哪个前向,请确保电机在此步骤开始时已在图片中连接。
添加螺旋桨。建议将螺旋桨留到最后,即完成软件部分后,并始终确保在螺旋桨开启时采取安全预防措施,以防万一出现问题。
软件
从 NXP 文档获取最新的 Emlid Raspbian 图像。以管理员权限下载、解压和运行 Etcher。选择带有图像和 sd 卡驱动器号的存档文件。点击“闪光!”。该过程可能需要几分钟。
首次设置
安装 Mission Planner 并转到 First Time Setup 部分。
按照此步骤连接您的无人机按照以下程序:
至
要连接到您的 UAV,请按照以下步骤操作:要连接到您的 UAV,请按照以下步骤操作:运行您的 MAVProxy.bat 文件和 Mission Planner。将电池连接到您的无人机并等待大约 30-60 秒。这将给它时间连接到无线网络。单击 Mission Planner 右上角的连接按钮。在出现的第一个对话框中键入 127.0.0.1 并单击确定。在下一个框中键入端口号 14551,然后单击确定。几秒钟后,Mission Planner 应该连接到您的 MAV 并开始在左侧面板中显示遥测数据。首次设置无人机时,有必要配置和校准某些硬件组件。ArduCopter 文档对如何配置框架类型、指南针校准、无线电控制校准、加速度计校准、遥控发射器模式设置、ESC 校准和电机范围配置有详尽的指南。根据您在无人机上安装 Raspberry Pi 的方式,可能需要在任务规划器中更改电路板方向。这可以通过调整 Mission Planner 的 Config/Tuning 选项卡下的高级参数列表中的 Board Orientation (AHRS_ORIENTATION) 参数来完成
第一次飞行


硬件和软件准备就绪后,就该为第一次飞行做准备了。
想象
无人机的任务是飞越山脉或荒野,发现人类或不规则物体,然后对其进行处理以查看该人是否需要帮助。在 mac 上使用 XQuartz 终端。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





