
资料下载


低成本机器人消毒系统开源分享
郭中
分享资料个
描述
这是一个便宜,易于制造的机器人。它可以用 UV-C 灯对您的房间进行消毒,它轻便灵活,可以在任何地形上行驶,并且可以安装在任何门口。它也是人类安全的,并且是完全自主的。
步骤1 :
首先,我的预算非常低,所以我买不到紫外线灯:(
其次,我的相机有镜头问题,所以我很抱歉。
让我们开始吧!
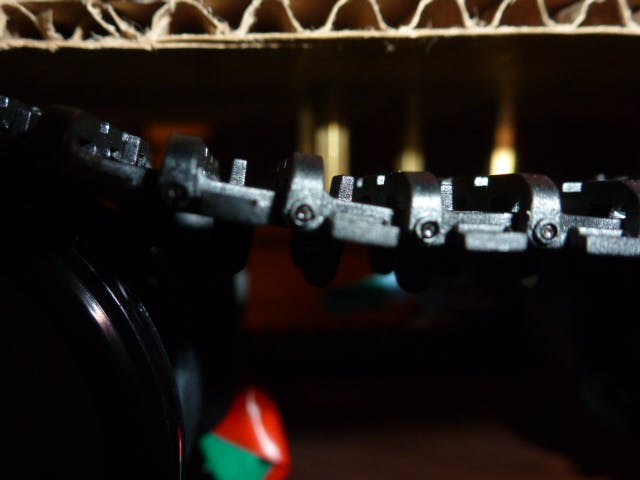
建造你的黑色角斗士底盘并安装轨道。
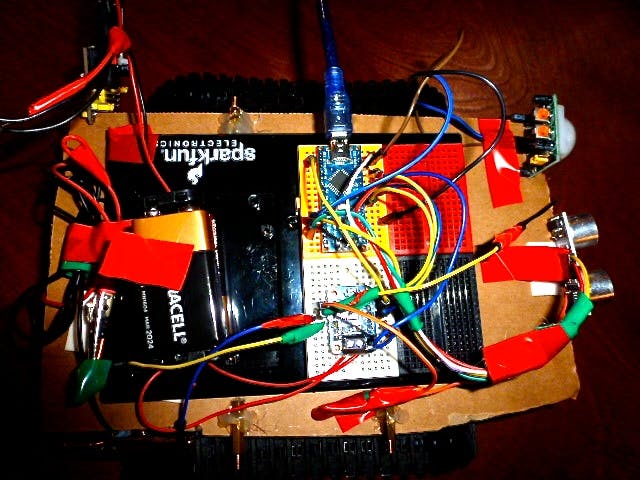
接线:
这是最难的部分。
因为线太多,所以我没有做电路图,但下面的列表显示了引脚编号。
引脚编号:
- 您的 SMD RGB LED 的“R”引脚到引脚 2 *
- 您的 SMD RGB LED 的“B”引脚到引脚 3 *
- 您的 PIR 输出到引脚 8
- 将您的 HC-SR04 触发到引脚 9
- HC-SR04 的回声到引脚 10
- 将继电器切换到引脚 11
DRV8833 引脚:
- AIN1 到引脚 4
- AIN2 到引脚 5
- SLP 至 3.3V
- BIN2 到引脚 6
- BIN1 到引脚 7
- AOUT 1 至左侧电机,标签侧
- AOUT 2 至左侧电机,未标记侧
- BOUT 2 至右侧电机,未标记侧
- BOUT 1 至右侧电机,标签侧
- 关于电机线的另一件事 - 像我在这里做的那样制作一些鳄鱼夹跳线,将面包板跳线电缆放入一个夹子中,并将另一个夹子连接到电机端子。对所有四根电线执行此操作。
UV-C 灯接线:
- 像这样将它连接到继电器(只是不要做 ESP 或电路板)。
* 将所有三根线连接到一个面包板总线,并将另一根线连接回各自的 Arduino 引脚。
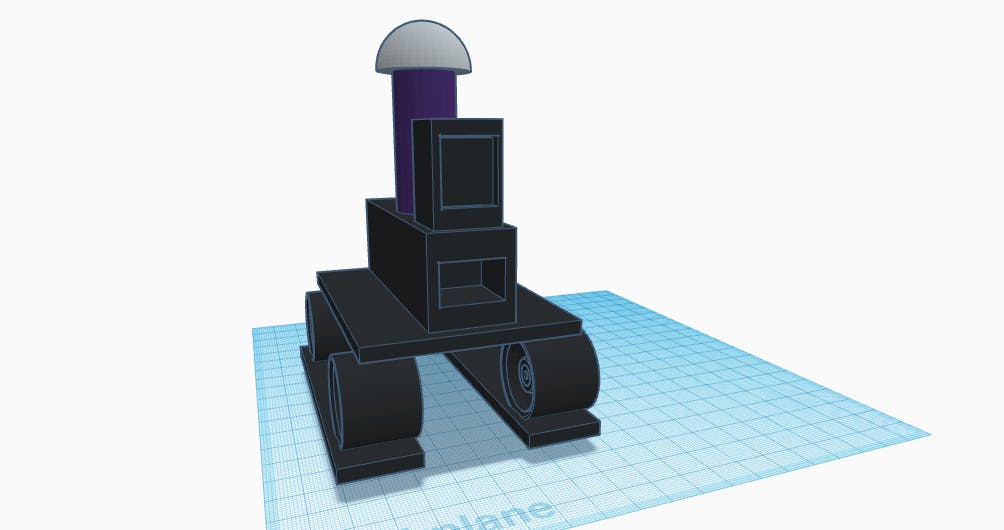
集会:
按照它应该是什么样子的图片。
将支架放在底盘上的 4 个孔中。拧上底部的螺母。然后在一块应该比底盘本身大一点的扁平纸板上制作与支架对齐的孔。
拧上纸板孔和支架顶部的螺丝。m
看看图片,看看我的意思。一张图抵得上一千个字,对吧?:)
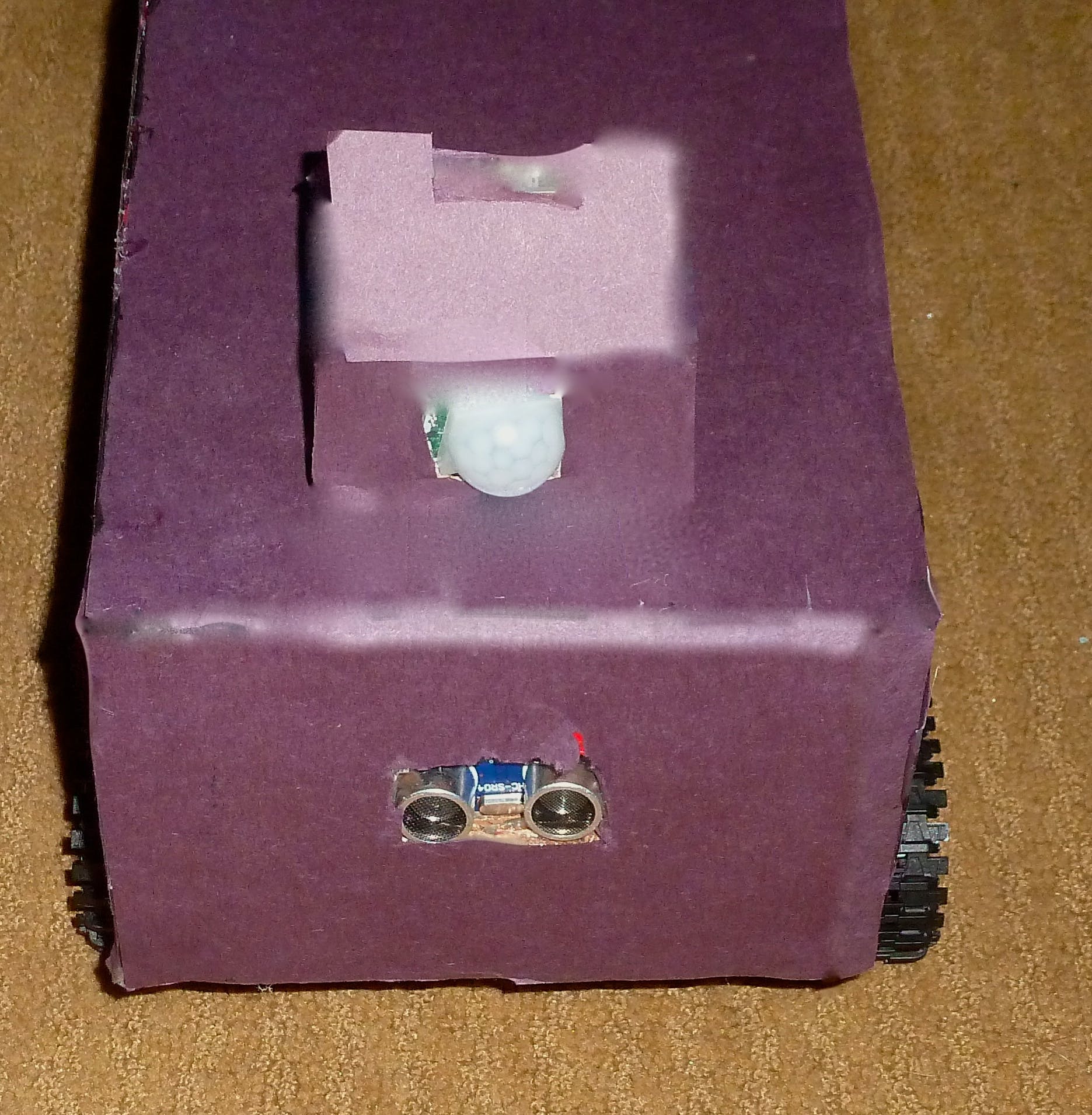
机箱盖:
用黑色建筑纸盖住纸板箱,如图所示。将小纸板箱放在顶部的正面并粘上。确保也用纸盖住热胶!图5是覆盖前,图6是覆盖后。
在小纸板箱的底部和顶部钻一个孔。然后在大纸板箱顶部钻一个孔,该孔与小纸板箱底部的孔完全相同。该孔用于 PIR 传感器和 SMD RGB LED 的电线。
有关更多信息,请参阅像素。
在超声波传感器的大盒子前面切一个矩形。
在 PIR 的小盒子前面切一个洞。
将铝箔挡板放在 UVC 灯的顶部。
编码:
禁用 SLP 引脚,这样您的机器人在上传时不会跑掉。将代码上传到 Arduino Nano。
在 Mu 中使用以下代码对您的 Microbit 进行编码。Mu 应该处于 micro:bit 模式。它会告诉您按下按钮 A 左转多少次,按下按钮 B 右转多少次,以及按下 A 和 B 时它运行了多长时间。按下时不要倾斜它!
用法:
启用 SLP 引脚,将断电的机器人放在干净的地板上,打开它,然后离开房间。
如果一切顺利,机器人应该等待 30 秒,直到你离开房间,校准它的 PIR 传感器,然后开始消毒。如果有人进入房间,它将立即关闭。
规范位于链接的 GitHub 存储库中。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




