
资料下载


Roomba Pine紫外灯机器人开源
杨军
分享资料个
描述
Roomba 松木 uvRob
该机器人专为家庭和办公室设计。uvRob 的紫外线 (UV) 光分布在三个部位:头部、上身和下身。紫外光会话安装在带有轮子和障碍物传感器的移动平台上。障碍物传感器帮助机器人导航并避开地板上的物体。
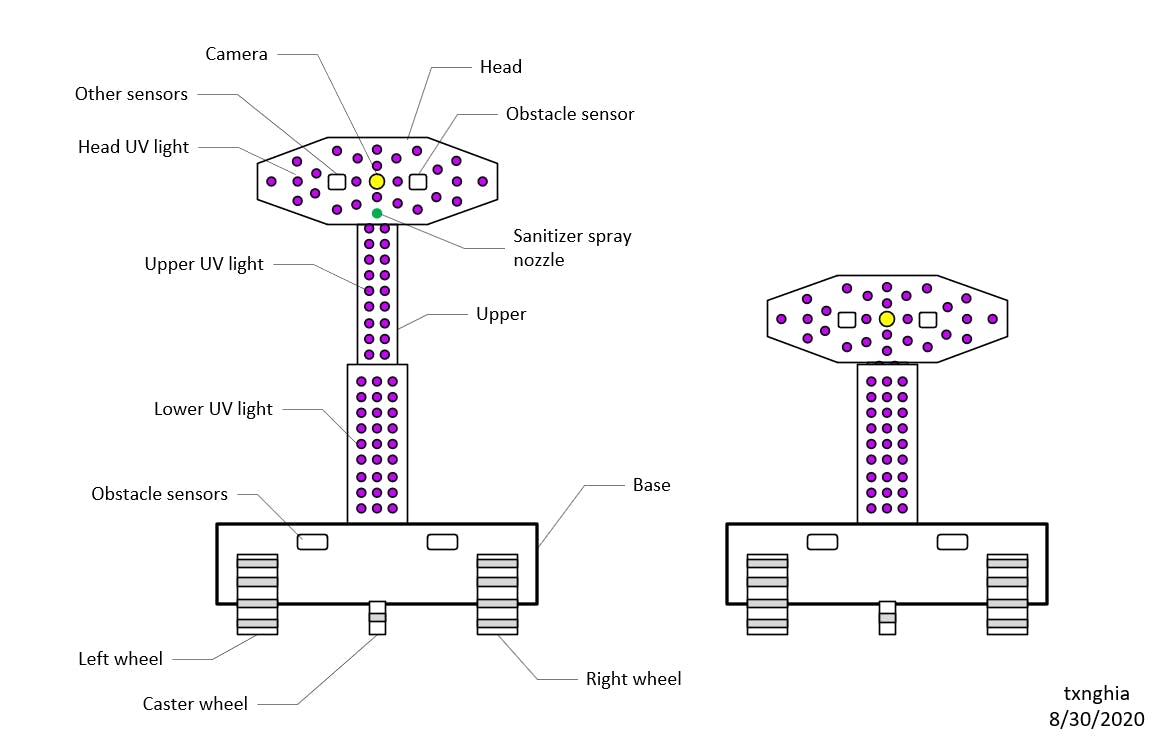
对于地板和桌下操作,头部被控制到机器人可以进入椅子下方的较低位置。

对于桌面和天花板操作,控制头部抬高到桌面上方,因此头灯可以在桌面上发光并传播到墙壁和天花板。上身和下身的灯发出全方位的光线,击中墙壁上的大多数物体。
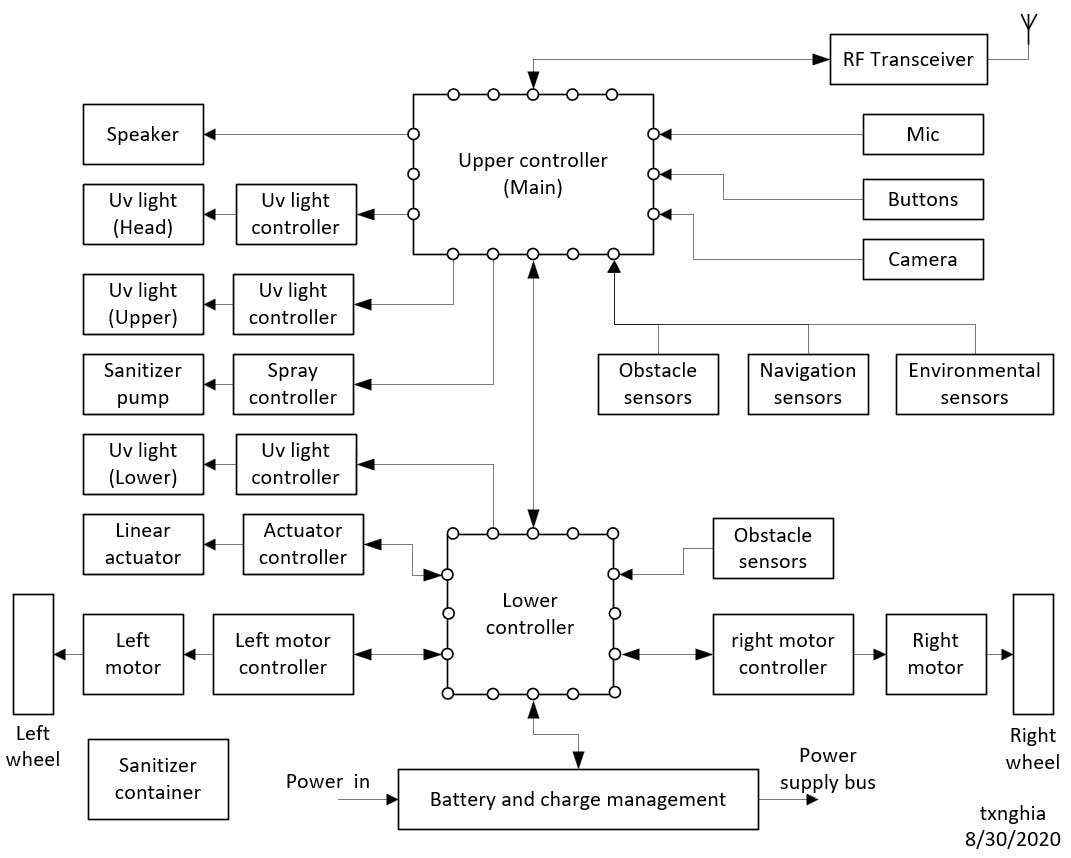
如上图所示,机器人的更高级设计可以具有附加组件。摄像头帮助机器人在该区域内更准确地导航。随着紫外光的投射,相机也可以用来捕捉污染位置。有了这些信息,主控制器可以命令灯光增加亮度,以便在可疑位置喷洒消毒剂。
麦克风可用于用户语音命令或记录周围的声级。按钮让用户设置和控制机器人操作。头部障碍物、导航和环境传感器为机器人导航提供信息。这可以帮助绘制和计算房屋建筑物中的操作路径。环境传感器还提供环境条件,如该区域的温度、湿度、空气质量。
每个会话的紫外线可以通过紫外线控制器控制打开/关闭以调节亮度。紫外线灯可以是霓虹灯管类型或 LED。
线性致动器控制器和线性致动器驱动头部上升和下降。头部障碍物传感器提供头部运动信息,避开障碍物。
消毒液容器用于储存消毒液。需要时可将液体泵送至喷嘴。
左右电机驱动机器人移动。脚轮有助于机器人更轻松地导航。左右电机控制器可提供机器人里程表信息
对于 uvRob 的原型设计,我使用了 iRobot 真空吸尘器作为移动平台。







声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





