
资料下载


在机器人汽车上实现超声波传感器
李霞
分享资料个
描述
介绍
我的最终项目的主要目标是在机器人汽车上实现超声波传感器,并使用罗盘和 MPU-9250 寄存器。此外,我还将使用来自机器人汽车的陀螺仪寄存器数据来输出机器人汽车在地板上的当前位置(x,y 坐标)。
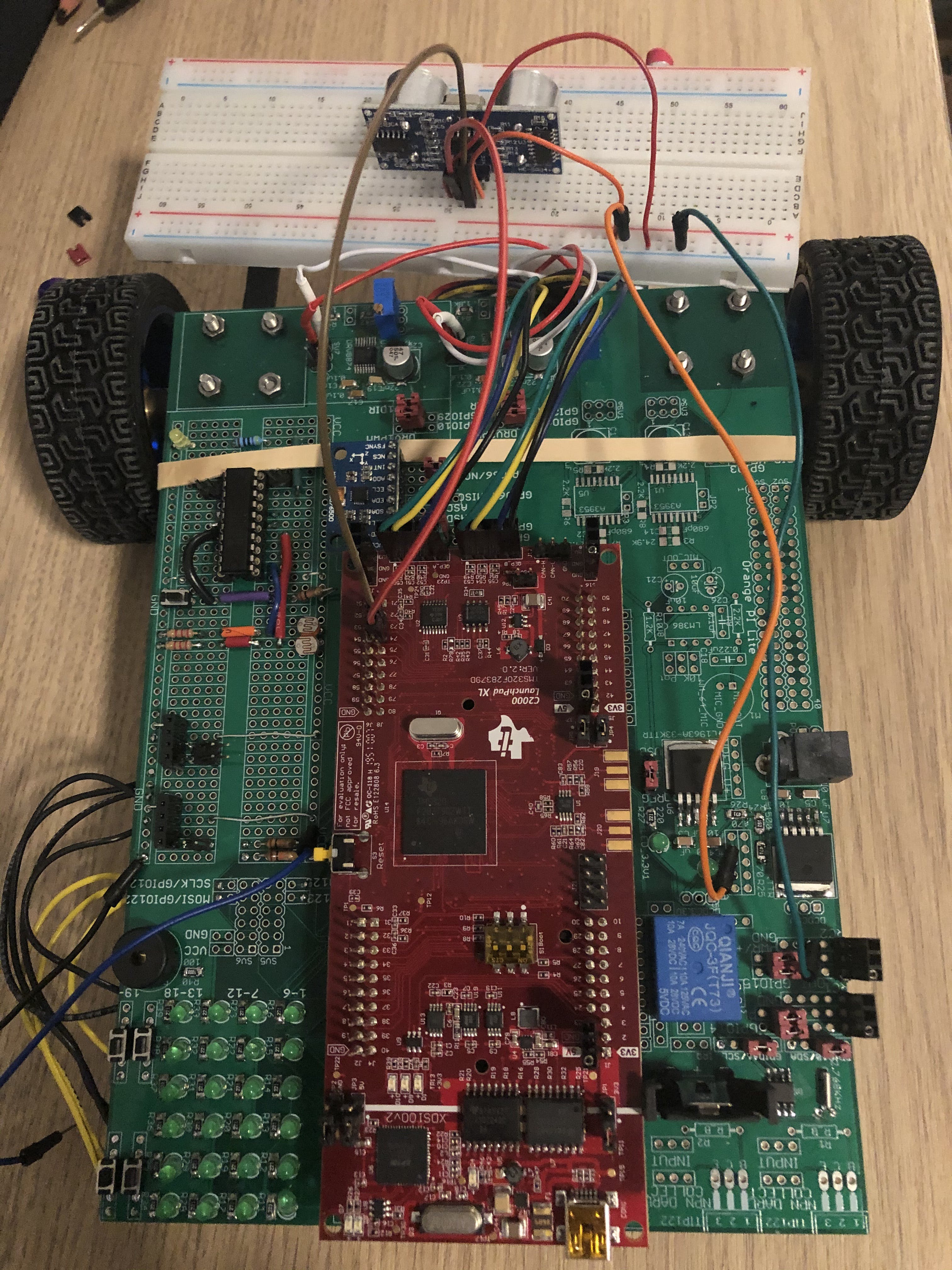
对于最后的演示,我希望我的机器人汽车能够避开障碍物,并且 teraterm 将打印机器人汽车的当前 x 和 y 坐标。首先,要正确实现超声波传感器,我们首先需要将其连接到我们使用的发射台,即 F28379D 发射台。超声波传感器的工作电压为 5 V。我们可以连接到发射台上的 5 V 电源引脚,也可以连接到绿板上的任何 5 V 电源。在这个项目中,我将绿板的电源焊接到超声波传感器上。超声波传感器有四个引脚,分别是 vcc、触发引脚、回波引脚和接地引脚。只要选择不干扰其他传感器和芯片,我们可以将触发引脚和回波连接到 F28379D 发射台的任何 GPIO 寄存器。在这个项目中,触发引脚连接到 GPIO 15,回声引脚连接到 GPIO 14。根据超声波传感器的数据表,触发引脚需要低电平至少 2ms,然后变为高电平 10ms,超声波传感器才能工作。根据我的测试,将初始低态时间设置更长可能有助于超声波传感器精确检测更长的距离。在这个项目中,触发引脚被命令保持低电平 3ms,然后保持高电平 10ms。最后,我使用 F28379D 发射台的 ecap 外设来捕捉回波引脚接收信号所花费的时间。回波距离是根据回波持续时间和 340 m/s 的速度计算得出的。下面的代码片段显示了触发超声波传感器的方法,我们将超声波传感器的状态存储在参数 trigger_state 中,当触发状态为 0 时,我们将参数设置为 1,即低电平状态持续 3ms。
void hc_sr04_trigger(void) {
if (trigger_count < 3) {
if (trigger_state == 0) {
// last for 3ms
GpioDataRegs.GPACLEAR.bit.GPIO15 = 1;
trigger_state = 1;
}
trigger_count++;
} else if ( (trigger_count >= 3) && (trigger_count < 12) ) {
// last for 10ms
if (trigger_state == 1) {
GpioDataRegs.GPASET.bit.GPIO15 = 1;
trigger_state = 2;
}
trigger_count++;
} else {
if (trigger_state == 2) {
trigger_count = 0;
trigger_state = 0;
}
}
}
为了计算机器人汽车的 x 和 y 坐标,我应用了 Yorihisa Yamamoto 在“NXTway-GS Model-Based Design - Control of self-balancing two-wheel robot built with LEGO Mindstorms NXT”中撰写的论文中的方程式。可以使用以下链接找到该项目:
具体来说,用于计算 x 和 y 坐标的方程是论文中的方程 3.1 和 3.2。

x 方向和 y 方向的速度通过使用车轮的半径乘以车轮的角速度,然后乘以电机的角度变化来计算。在计算 x 和 y 的速度后,我们可以直接根据我们设置的时间步长对速度进行积分以获得 x 和 y 坐标。在这个项目中,可以使用 teraterm 查看 x 和 y 坐标。下面的代码就是这个公式和计算的实现。
LeftWheel = readEncLeft();
RightWheel = -readEncRight();
VLeft = (LeftWheel - LeftWheeli)/0.004;
VRight = (RightWheel - RightWheeli)/0.004;
dtheta = (VLeft + VRight)*0.5;
thetaabs = (0.108/0.679)*(RightWheel - LeftWheel);
x_dot = (0.108*dtheta)*cos(thetaabs);
y_dot = (0.108*dtheta)*sin(thetaabs);
x_pos = x_posi + (0.004*((x_dot + x_doti)/2));
y_pos = y_posi + (0.004*((y_dot + y_doti)/2));
x_posi、y_posi、x_doti 和 y_doti 是过去状态(上一个时间步)的参数,我们使用这些参数进行时间积分。
MPU 9250 寄存器中的陀螺仪读数也可用于计算电机角度的变化。使用的公式是根据本项目中 0.004s 的时间步长对陀螺仪读数进行积分。
蜂鸣器连接到 F28379D 发射台的 GPIO 16,应用 EPWM 9A 控制蜂鸣器。当需要蜂鸣器时,我们需要将 pinmux 设置为 5,对应 EPWM 9A。当我们不需要使用蜂鸣器时,我们可以将 pinmux 设置为 0 以阻止它发出噪音。在这个项目中,蜂鸣器被用作通知障碍物的信号。每当超声波传感器检测到某物时,蜂鸣器就会发出声音通知它。
对于 MPU 9250 寄存器,SPI(串行外设接口)用于发送和接收来自 MPU 9250 寄存器所需的位和数据。我们设置 SPI 以接收来自加速度计的数据和来自 MPU 9250 寄存器的陀螺仪读数。MPU 9250 连接到 F28379D 启动板的 GPIO 63、GPIO 64、GPIO 65 和 GPIO 66。
项目基本逻辑
本项目中机器人小车的逻辑是在cpu timer 0中传输MPU 9250相关寄存器,在cpu timer 0中触发超声波传感器,在cpu timer 1中计算电机相关参数。我们使用 if 语句来决定是否转向。如果超声波传感器返回的回波距离小于 30cm,则转弯参数将增加到 1。汽车将开始向左转弯。连接蜂鸣器的GPIO 16的pinmux将设置为通道5,即EPWM 9A,用于蜂鸣器发出声音。当超声波传感器没有检测到任何东西时,GPIO 16 的 pinmux 为 0。
结论
根据测试和观察,机器人小车可以在超声波传感器的实施下正常工作。机器人检测到障碍物后向左转,同时蜂鸣器发出提示音。teraterm 将输出机器人汽车的方向和 x 和 y 坐标。
电路原理图和电路板由伊利诺伊大学厄巴纳香槟分校的布洛克教授(Dan Block)设计。电子邮件:d-block@illinois.edu
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





