
资料下载


大猩猩机器人开源分享
分享资料个
描述
每年在图卢兹(法国)都有图卢兹机器人竞赛#TRR2021
比赛包括两足机器人和四足机器人的 10 米自主冲刺。
我为四足动物收集的当前记录是 10 米短跑 42 秒。
所以考虑到这一点,我必须想出一个设计一个我认为可以击败它的机器人的计划,以便成为新的卫冕冠军!!!
从教程成员“jegatheesan.soundarapandian”和去年图卢兹机器人竞赛“Oracid 1”的获胜者那里寻求灵感,他们似乎都喜欢设计和分享有关如何构建四足动物的教程。我开始基本上复制那里的设计并使其更大一点!
该设计基于每条腿的五连杆机构 2 个伺服器为每条腿提供动力,总共 8 个伺服器。
规则规定,除了开始信号之外,整个比赛必须由机器人自主进行,所以我必须想出一个轻量级的系统来让机器人保持在轨道上,在这种情况下,我使用了 QMC5883L 磁力计(数字罗盘)所以它可以保持正确的方向,一个 HC-SR04 超声波传感器,以防机器人真的搞砸并开始以 90 度角撞到墙上,我只是在代码中使用了一个计步器来告诉它应该走多少步10米。
如果您对构建这个机器人感兴趣,请不要担心这只猴子已经考虑好了一切!
100% 支持免费 3D 打印主体:
除了电子设备和连接电子设备的螺丝外,所有东西都是 3D 可打印的,唯一使用的是相同的小十字头螺丝,您只需要一个小十字头螺丝刀来组装机器人
简单的即插即用电子产品:
无需复杂的焊接
合理的打印时间:
他可能看起来很大而且很有气势,但他只有 15 小时的印刷品(对某些人来说时间很长:D)
合理的构建量要求:
他可以在相对较小的打印机上打印,打印体积仅为 L:150cm x W:150cm x H:25cm
机器人总成本:
仅机器人一个成本就在 75 美元左右来制造包括在内的充电器。
如果您想要与我相同的设置,则需要3D 打印控制器(可选)。
警告:
我使用的 5V 3A 电源不是最好的解决方案,因为这个机器人要行走所有 8 个舵机必须同时运行,因此它们会消耗很多电流,不用担心我没有让机器人着火或发生任何事情但预计功率晶体管会发热很多,我不建议一次使用机器人超过 2 分钟,让它在两次运行之间冷却,以避免对伺服护罩造成任何不必要的损坏。
如果你们中的任何人对此问题有解决方案,您的意见将不胜感激!
补给品:
机器人用品:
- 8x Tower Pro MG90S 模拟 180 度伺服(Aliexpress/亚马逊)
- 1x Sunfounder 无线伺服控制板(Sunfounder Store/RobotShop)
- 1x Arduino NANO(速卖通/亚马逊)
- 1x NRF24L01 收发器模块(如果您不使用控制器,则不需要此)(Aliexpress/Amazon)
- 1x 磁力计(数字罗盘)QMC5883L GY-273(Aliexpress/亚马逊)
- 1x 超声波传感器 HC-SR04(Aliexpress/亚马逊)
- 2x 18650 3.7V 锂离子电池(Aliexpress/亚马逊)
- 1x 18650 双电池座,带开关(Aliexpress/亚马逊)
- 1x 18650 锂离子电池充电器(Aliexpress/亚马逊)
- 4x 母对母杜邦跨接电缆 10 厘米长(Aliexpress/亚马逊)
- 4x 母对母杜邦跨接电缆 20 厘米长(Aliexpress/亚马逊)
- 10x 螺丝 2 毫米 x 8 毫米(与一包伺服系统中的螺丝相同)(Aliexpress/亚马逊)
控制器:
要手动控制这个机器人,您需要 3D 打印的 Arduino 控制器(链接在这里)
机器人也可以是完全自主的,因此控制器不是强制性的。
塑料:
零件可以用 PLA 或 PETG 或 ABS 打印。
!!请注意 500 克线轴足以打印 1 个机器人!
3D打印机:
所需的最小构建平台:L150mm x W150mm x H25mm
任何 3d 打印机都可以。我亲自在 Creality Ender 3 上打印了这些部件,这是一款价格低于 200 美元的低成本 3D 打印机。打印出来的效果很完美。
第 1 步:3D 打印零件
。
- 将圆形销 L1 放入 BASE FRONT 前左舵机支架的孔中
- 将其中一个 MG90S 舵机的电缆穿过 BASE FRONT 左前舵机支架中的插槽
- 将 MG90S 伺服插入到位
- 用 2 个螺丝将 MG90S 伺服固定到位(不要过度拧紧,因为这可能会损坏底座)
- 对 BASE FRONT 左后、右前和右后伺服支架重复相同的过程
- 对 BASE BACK 左前、左后、右前和右后伺服支架重复相同的过程
- 使用 2 个对角螺钉或 4 个螺钉将电池座固定到 BASE ELECTRONICS
- 用 2 个斜对角螺钉或 4 个螺钉将无线伺服控制板固定到 BASE ELECTRONICS
- 将 Arduino nano 和 NRF24L01 收发器夹到无线伺服控制板
- 通过 2 个朝后的方孔 USB 端口将 BASE FRONT 滑到 BASE ELECTRONICS 上
- 用 2 个方形夹固定到位
- 通过 2 个朝后的方孔 USB 端口将 BASE BACK 滑到 BASE ELECTRONICS 上
- 用 2 个方形夹固定到位
- 用 2 颗螺丝将磁力计固定到底座前部
- 将超声波传感器夹在 BASE FRONT 上
- 如图所示,将伺服电缆引导至无线伺服控制板
第 3 步:插入电子设备
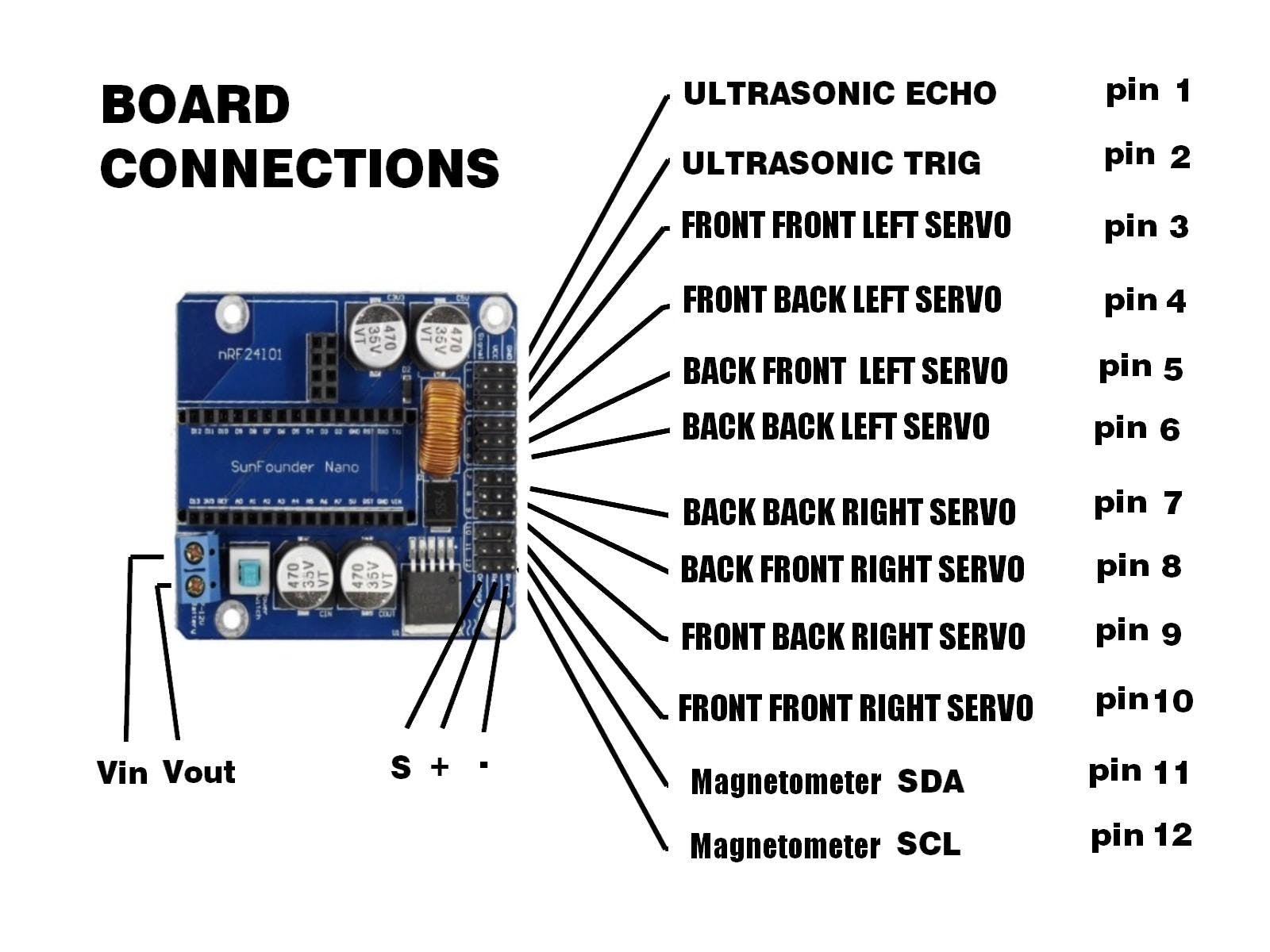
。
- 将 1 英尺滑过 1 个圆形销 L4
- 将 1 CALF EXT 的较厚端滑过 CIRCULAR PIN L4,伸出的一侧背对脚
- 在圆形销 L4 上滑动 2 CALF INT
- 将 1 CALF EXT 的较厚端滑过 CIRCULAR PIN L4,伸出的一侧朝向脚
- 在圆形销 L4 上滑动 1 英尺
- 用 3 个圆形夹子固定到位
- 将 1 个圆形销 L3 滑过组装好的 CALF EXT 的 1
- 将 1 个 THIGH SERVO 滑到 CIRCULAR PIN L3 上,伸出侧朝向 CALF EXT
- 在圆形销 L3 上滑动 1 大腿
- 将 CIRCULAR PIN L3 滑过另一个组装好的 CALF EXT
- 用 3 个圆形夹子固定到位
- 将 1 个 THIGH SERVO 滑到 1 个圆形销 L2 上,伸出侧朝向圆形销 L2 的头部
- 将圆形销 L2 滑过两个组装好的 CALF INTS
- 滑动 1 大腿穿过圆形销 L2
- 用 3 个圆形夹子固定到位
- 对剩下的 3 条裸腿重复所有过程,记住当腿组装到机器人上时,销头朝外,CALF EXTS 位于 CALF INTS 前面,因此组装前后相同,但从左到右对称.
第 5 步:安装 Arduino
GorillaBot 使用 C++ 编程来运行。为了将程序上传到 GorillaBot,我们将使用 Arduino IDE 以及其他一些需要安装在 Arduino IDE 中的库。
- 在您的计算机上安装 Arduino IDE:Arduino IDE (链接在这里)
为了将库安装到 Arduino IDE,您必须对以下链接中的所有库执行以下操作
- 单击下面的链接(这将带您到库 GitHub 页面)
- 单击显示代码的绿色按钮
- 单击下载 ZIP(下载应在您的网络浏览器中开始)
- 打开下载的库文件夹
- 解压下载的库文件夹
- 复制解压后的库文件夹
- 将解压后的库文件夹粘贴到 Arduino 库文件夹(C:\Documents\Arduino\libraries)
图书馆:
我们已经准备好了,你应该准备好了为了确保你已经正确设置了 Arduino IDE,请按照以下步骤操作
- 在下面下载所需的 Arduino 代码(GorillaBot Controller & Autonomous.ino)
- 在 Arduino IDE 中打开它
- 选择工具:
- 选择板:
- 选择 Arduino Nano
- 选择工具:
- 选择处理器:
- 根据您购买的 Arduino nano 选择 ATmega328p 或 ATmega328p(旧引导加载程序)
- 点击Arduino IDE左上角的Verify按钮(Tick按钮)
如果一切顺利,您应该在底部收到一条消息,显示完成编译。
第 6 步:上传代码
现在是时候将代码上传到 GorillaBot 的大脑 Arduino Nano。
- 通过 USB 电缆将 Arduino Nano 插入您的计算机
- 单击上传按钮(右箭头按钮)
如果一切顺利,您应该会在底部收到一条消息,上面写着完成上传。
第 7 步:校准舵机
为了正确组装腿,我们必须将伺服系统归位到其原始位置。
- 将 2 节锂离子电池插入电池座
- 打开机器人并等待 5 秒钟,让伺服系统到达其原始位置
- 关闭机器人
第 8 步:将腿组装到身体上
将腿连接到伺服系统非常简单,只需记住在装配针头朝外时,CALF EXT 将放置在 CALF INT 的前面。
- 将其中一条腿的 CALF EXT 侧的 THIGH 滑到前左舵机支架上的 CIRCULAR PIN L1 上
- 用 1 个圆形夹固定到位
- 将同一条腿的 CALF EXT 侧的 THIGH SERVO 滑到前左前伺服支架上的伺服头上(确保 THIGH SERVO 与身体成 90 度角)
- 使用单臂伺服喇叭和小伺服螺钉将 THIGH SERVO 固定在与车身成 90 度角的位置
- 对该腿的剩余 THIGH 和 THIGH SERVO 对前后左伺服支架重复相同的过程
- 对剩余的 3 条腿重复所有先前的过程
第 9 步:准备比赛!!!
所以就是这样,你应该准备好了!!!
手动模式:
- 打开机器人和控制器,使用操纵杆的上下左右方向检查机器人是否正常行走。
- 按下向下按钮,机器人应该会跳一段小舞
如果一切正常,伺服系统已经校准好,您现在可以尝试自主模式。
自主模式
自主冲刺模式使用磁力计保持机器人以恒定方向运行 2.5 米。您可以使用控制器编程所需的位置和所需的校正角度
- 打开机器人和控制器
- 向各个方向移动机器人以校准磁力计 5 秒
- 将机器人放在地面上您希望他进入的位置
- 按向上按钮以记住该标题
- 将机器人向所需航向左侧旋转 30-45 度
- 按左键记住那个位置
- 将机器人转向所需航向右侧 30-45 度
- 按下右侧按钮以记住该位置
- 将机器人放回其所需的航向
- 按下操纵杆按钮启动机器人
机器人会以恒定的方向跑 2.5 米,然后停下来,跳起胜利之舞。
我的机器人在 7.5 秒内跑完 2.5 米。
这给了我 30 秒内 10 米的理论时间,希望这足以让我在图卢兹机器人比赛中玩得开心
祝我好运,对于那些决定建造这个机器人的人,我很想听听你的反馈和你认为可以做出的潜在改进!!!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




