
资料下载


地面控制站无人机开源分享
分享资料个
描述
**注意** 如果您想直接进入构建过程,请跳过带 (*) 的部分
介绍 *
如今,无人机比以前更受欢迎,因为系统成本更低,应用范围更广。许多高科技公司甚至涉足该领域,例如亚马逊,他们推出了 Prime Air 送货无人机。
Élikos Polytechnique Montréal 是一个学生俱乐部,旨在帮助对该工程领域感兴趣的学生扩展他们对那些可用的无人系统的知识。爱好者社区已经开始改进定制飞行控制器,现在可以找到多种开放式飞行控制软件(如PX4和ArduPilot )的解决方案。
地面控制站 (GCS)... 为什么?我的笔记本电脑可以完成所有工作!*
当我提出通过添加一个完整的控制系统来提高我们的飞行序列的有效性的想法时,这正是我必须处理的第一个问题。我们主要使用笔记本电脑,但考虑到设置Mission Planner (ArduPilot) 或QGroundControl (PX4)等软件需要一些知识,我总是发现该解决方案是临时的。让每个人都使用相同的设置很复杂,而且对于那些只对驾驶无人机感兴趣的人来说,测试他们建造的东西太费时了。所以我认为让每个人都使用连接到地面控制站的同一台计算机将是一个很大的进步。
GCS 的功能 - 我想改进什么?*
Élikos participated in few competitions over the years like the IARC (International Aerial Robotics Competition) and the SUAS (Student Unmanned Aerial System) competition. Both of those contests brought challenges that we had to find solutions for. Last year, it was required to fly a UAV over a solar panel out of the line of sight to detect with cameras those that were damaged (using IR). We went with a typical solution using analog video-feed to help a pilot to navigate to the solar panel location. Many issues came out at this moment:
- The screen was way too small for this purpose.
- Analog systems are reliable and simple but the video quality isn't great and it's hard to analyze anything captured by it.
- 我们没有实施数据通信系统,因此我们无法在飞行过程中实时分析数据。
让我们深入
我将这个项目划分如下:
- 机械的
- 电气(交流和直流)
- 软件与网络
机械部分:
GCS 需要便携,所以我选择了当时我们已经拥有的 Nanuk 型号 945。
下一步,我设计了 3 个主要组件以安装在内部:背板、盖底板和盖顶板。
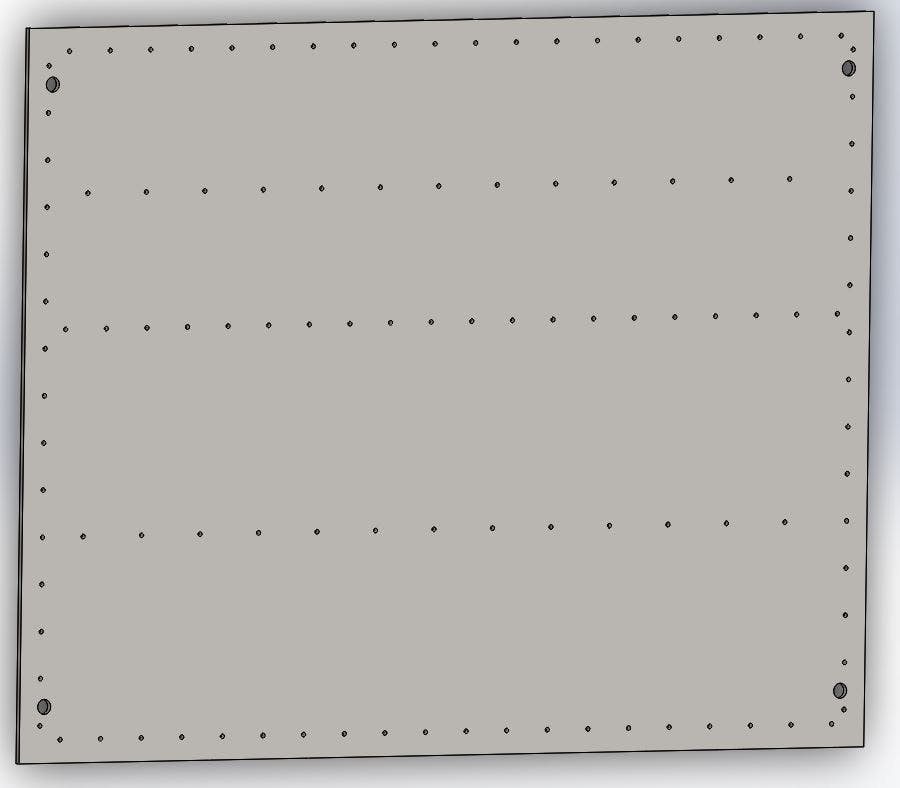
有了图纸,我联系了一家公司用激光进行切割。现在制造起来非常便宜。材料:SS-304 和铝 6061 。
掌握了所有零件(电气和机械部件)后,我开始组装:
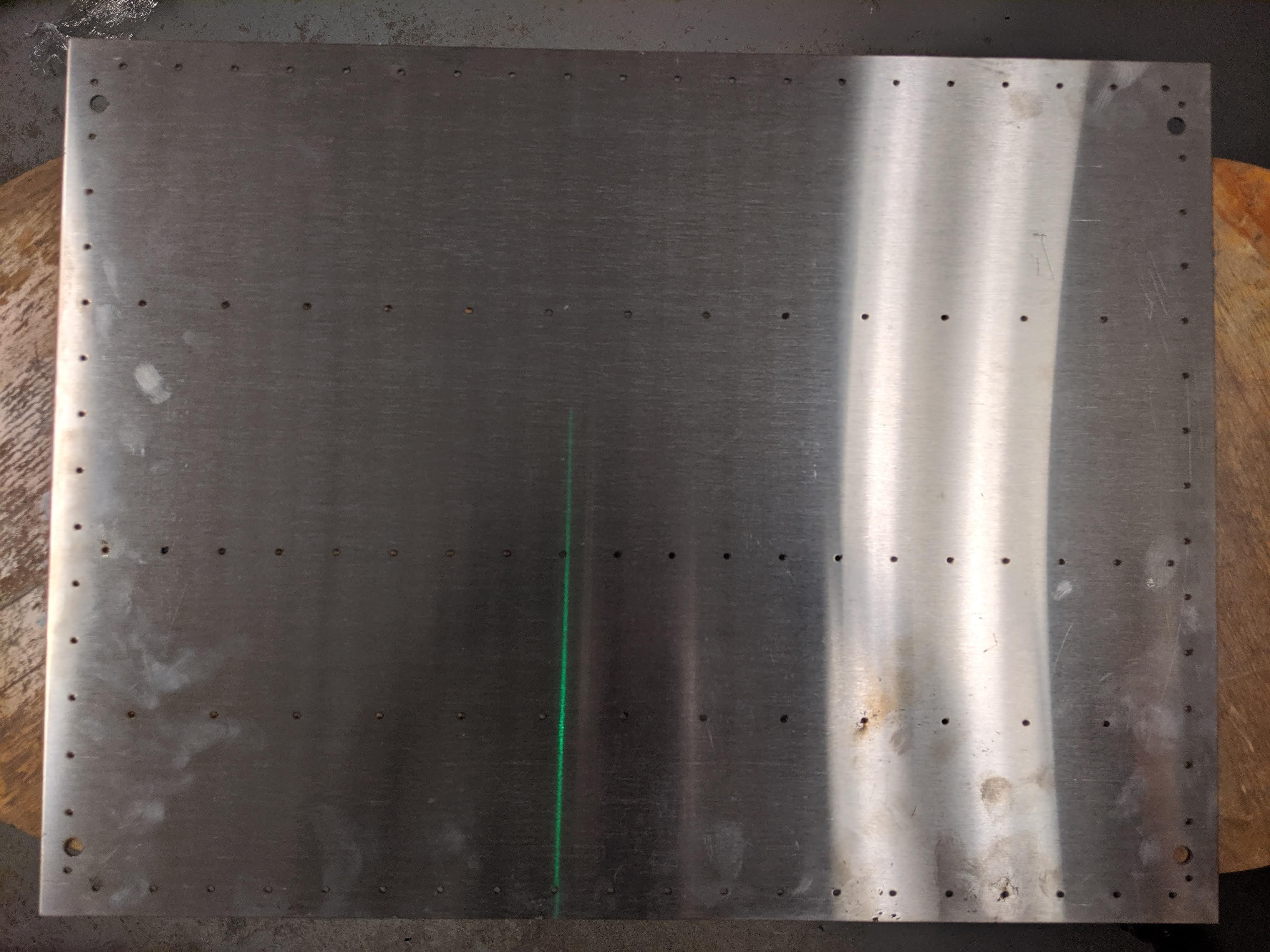
- 用于此构建的孔尺寸:1/8"
- 使用带垫圈的#6 自攻螺丝固定 DIN 导轨和线槽
然后是所有组件的标记和接线。我决定标记我系统中的每根电线,以便能够使用电气原理图快速找到任何连接。如果您不使用提供标记电线功能的 AutoCAD Electrical,我建议您只需按照自己的系统从 100 开始到 1XX。不要忘记将数字放在电线的每一端。
我在这个过程中使用了 Dymo Rhino 标签打印机,但任何标签打印机都可以。
目前的最终结果如下所示:

电气部分:
该系统可分为两个子类:交流和直流。当我们在室外使用GCS时,直流电路将使用6S锂聚合物电池作为备用电源。该项目的这一部分仍然需要更多测试,因为它需要一些电池管理功能。电气原理图已经包含了设计的这一部分。
我使用 AutoCAD Electrical 来创建原理图,因此根据经验可能不是每个人都清楚,但简而言之,请遵循以下简单准则:
- 2 个来源:120VAC 和 6S 锂聚合物电池(6 节电池 * 4.2V 最大值/电池 = 25.2V)
- 获取 120VAC 至 24VDC 的 AC/DC
- 使用电池管理系统 (BMS) 保护 Lipo 免受过放电和过电流的影响。*使用普通的Lipo充电器给电池充电。
- 在 24VDC(来自 AC/DC 和 25.2V Lipo)之间使用 SPDT 开关
- 使用两个 DC/DC(24V/12V、24V/5V 或 12-24/5V 等)
- 使用保险丝或断路器(C 型或 D 型)为过流和短路提供一些保护。*经验法则:1.25*电流消耗 = 额定电流
- PoE 以太网交换机非常昂贵,所以我改用无源 PoE 电缆。为此,只需取下插孔连接器并将其插入 24V 系统即可。*重要说明* 使用锂聚合物电池的直流电压时,请验证设备的耐受性,因为电压会略有变化。对于 Ubiquiti 设备,公差通常在 +/- 10% 的范围内。
- 查看我的物料清单 (BOM),了解有关组件的更多详细信息。
保护:
- 在每个 AC/DC 或 DC/DC 转换器之后放置至少一个断路器或保险丝,以遵守模块的最大电流输出。
- 您应该在每个重要设备(如 PC、显示器或无线电调制解调器)之前执行相同的操作。
电力调配:
24V直流:
- PoE 无源电缆(为 Ubiquiti 设备供电)
- DC/DC 转换器(5V 和 12V)
12VDC:
- 监视器
- 电脑(英特尔 NUC7i7BNH)
- 风扇(1X 排气和 1X 进气)
5VDC:
- RFD900(无线电调制解调器)
- **Raspberry Pi 如果您更喜欢它而不是普通 PC
备注 DC 部分:
- 电池管理系统在系统中实现非常重要,以保护电池免受过度放电。一个伟大而简单的解决方案是使用锂聚合物电池测试仪,我们可以移除蜂鸣器来触发继电器,将电池与电路断开。DIY Perks有一个很好的教程。
- 最后,只需将 BMS 的输出连接到 SPDT 开关即可。此开关选择来自 AC/DC 转换器的电压或来自电池的 DC。(仍在进行中)
软件和网络:
为了取代之前使用模拟通信的系统,我使用 Ubiquiti 设备在 GCS 和无人机之间实现 Wi-Fi 通信。该项目中使用的产品系列称为airMAX 。更具体地说,我使用了两个Bullet AC以提高便携性,但任何 airMAX 产品都可以相互配合使用。LiteBeam和 Bullet AC 也是获得更好射程的良好组合。
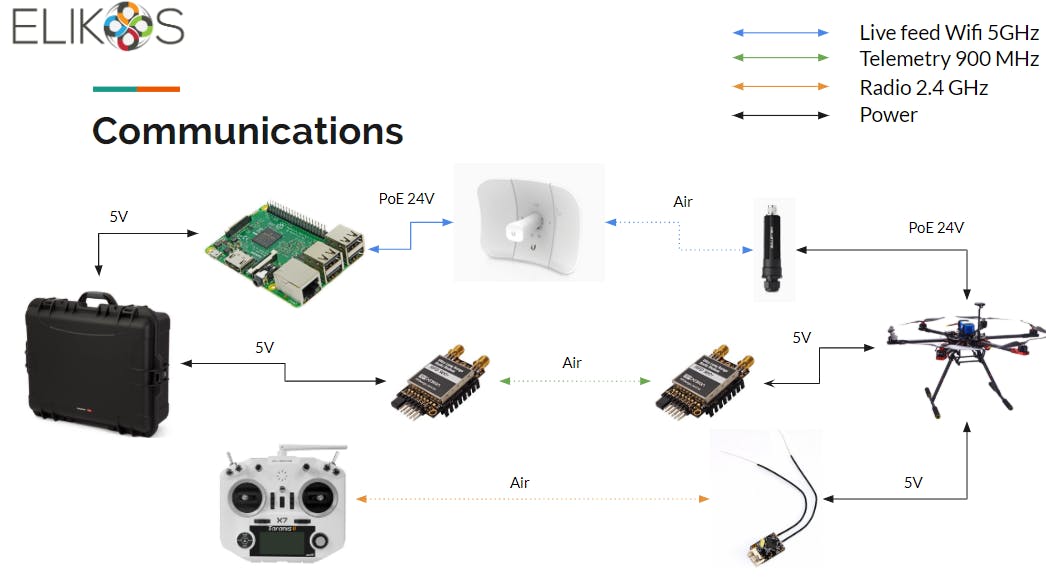
在DeplotDepot的赞助下,我能够轻松获得所有 Ubiquiti 设备,非常感谢。此图中未显示的最后一件事是接入点。我选择了连接到 GCS 中的以太网交换机的 Ubiquiti AC Pro。此功能允许任何人远程连接到 GCS 并获取 Wi-Fi 通信提供的所有数据。我在 GCS 中使用了 Intel NUC7i7BNH 而不是 Raspberry Pi,以便让所有软件在一台功能强大到足以分析数据的计算机上运行。
Ubiquiti 设备非常易于使用。这些是软件团队遵循的准则:
如何使用桥接器设置 Bullet AC 和 LiteBeam AC Gen2(或其他 Bullet AC)
1) 启动 Bullet 并让它广播它的 SSID
2) 当您看到 SSID“Bullet (...)”时,使用笔记本电脑连接它
3) 确保在连接的 wifi 连接上为笔记本电脑设置静态 IP 地址。(我使用 192.168.1.21,因为 192.168.1.20 是 Bullet 的 IP。掩码是 255.255.255.0,网关是 192.168.1.1)
4) 有了静态地址后,就可以在子弹创建的网络中进行通信了。打开网络浏览器并在地址栏中输入 Bullet 的地址 (192.168.1.20)。
5) 按照说明创建管理员帐户。如果您没有说明,而是有一个登录页面,则需要重置 Bullet(或 LiteBeam),重新启动它并再次执行第 4 步。
6) 现在您应该能够连接到 Bullet 的管理面板。转到左侧的设置部分。
7) 转到网络选项卡。
8) 确保模式为“Access Point PtP”(默认为“Station PtP”)
9) 将 Bullet 的 IP 地址设置为 192.168.1.2(默认为 192.168.1.20)并保存更改。这是必要的,因为另一个 Bullet(或 LiteBeam)的默认 IP 为 192.168.1.20,它们将无法通信。
10) 现在您可以通过以太网连接您的笔记本电脑或任何设备,该设备将成为网络的一部分。
与 LiteBeam 配对
11) 启动 LiteBeam 并按照与 Bullet 相同的步骤进行设置。确保保留 IP 地址 192.168.1.20(也不要执行第 9 步)并将网络模式保持为“Station PtP”(也不要执行第 8 步)
12) Bullet 和 LiteBeam 应该自动相互连接。对于要从 Bullet 端或 LiteBeam 端添加到网络的任何设备,请确保设置一个未被使用的静态 IP 地址(掩码为 255.255.255.0,网关为 192.168.1.1)网络中的任何其他设备。或者,您可以尝试设置 DHCP 服务器或让 Bullet 和 LiteBeam 使用 IPV6。
13) 您现在应该有一个可以用作 LAN 的功能网络。
学分:
非常感谢 Elikos 的软件团队通过网络的建立使这个项目的最后一部分成为可能。最后,我要感谢 Elikos 的赞助商对我们学生俱乐部的投资,这为从头开始设计项目带来了难以置信的学习体验。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




