
资料下载


声纳测绘仪开源构建
的撒的
分享资料个
描述
前提
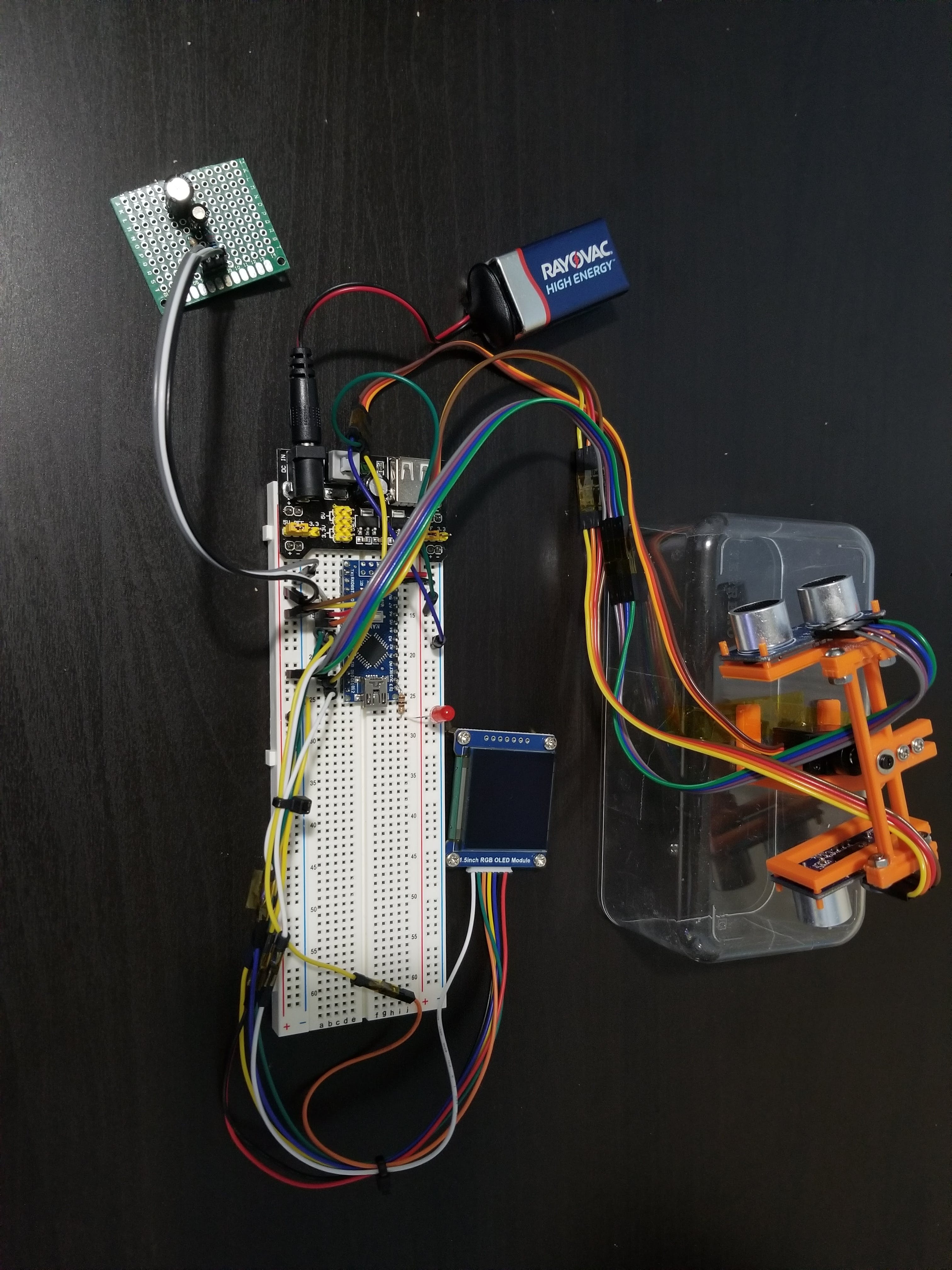
我们开发了一种固定式主动声纳测绘仪,无需人工协助即可使用超声波传播检测未知环境。当我们的设备运行时,两个传感器通过发射脉冲并在 360° 范围内监听回声来重复收集超声波数据。数据由 Arduino Nano R3 收集,它将数据转换为笛卡尔平面上的点。这些数据点显示在 OLED 显示屏上,便于可视化。为了保护我们的*已编辑*客户及其特殊要求的匿名性,我们仅列出了我们技术的一些应用:
- 绘制受自然灾害(地震、海啸、洪水、飓风)影响的区域。我们的设备可以访问遭受结构性损坏并且由于建筑物倒塌的高风险而对人类来说太危险而无法进入的建筑物。
- 进入已知对人类致命的危险(低水平辐射、有毒烟雾、化学品泄漏等)的封闭空间
- 用极其有限的眼睛绘制出对人类来说太暗而无法看到的区域
- 通过倾斜传感器和 LED 输出确保声纳测绘仪保持直立位置
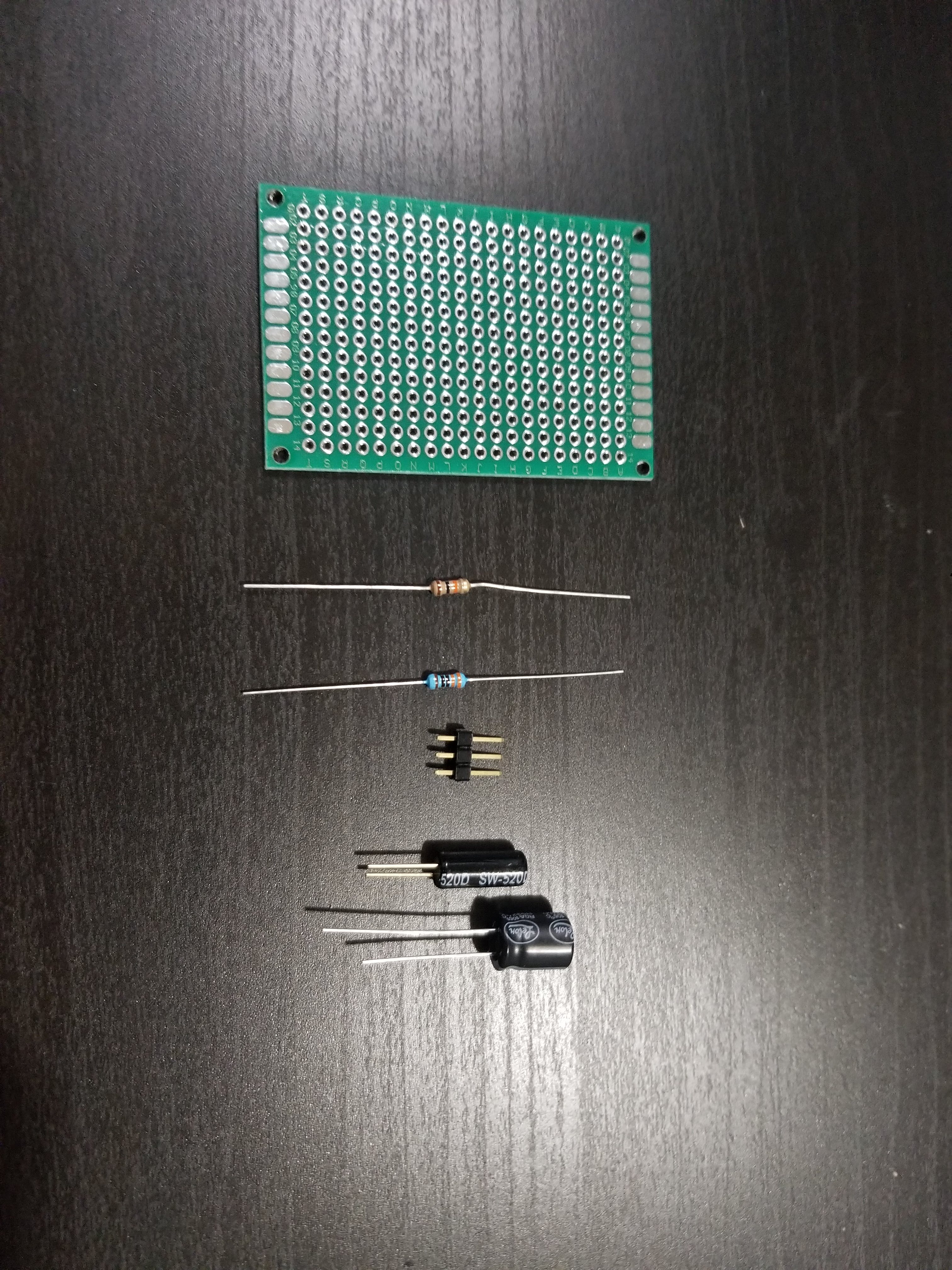
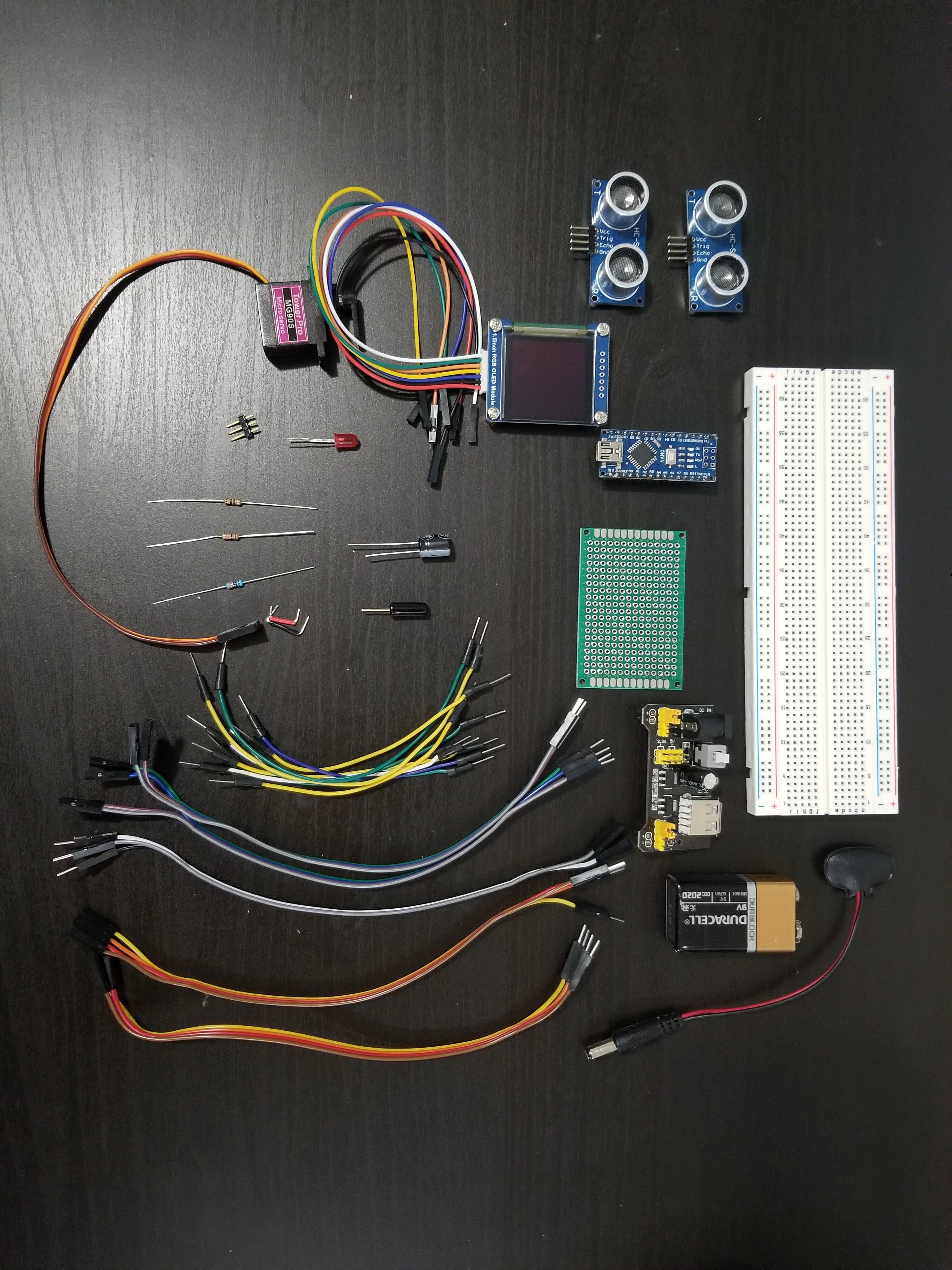
电子产品
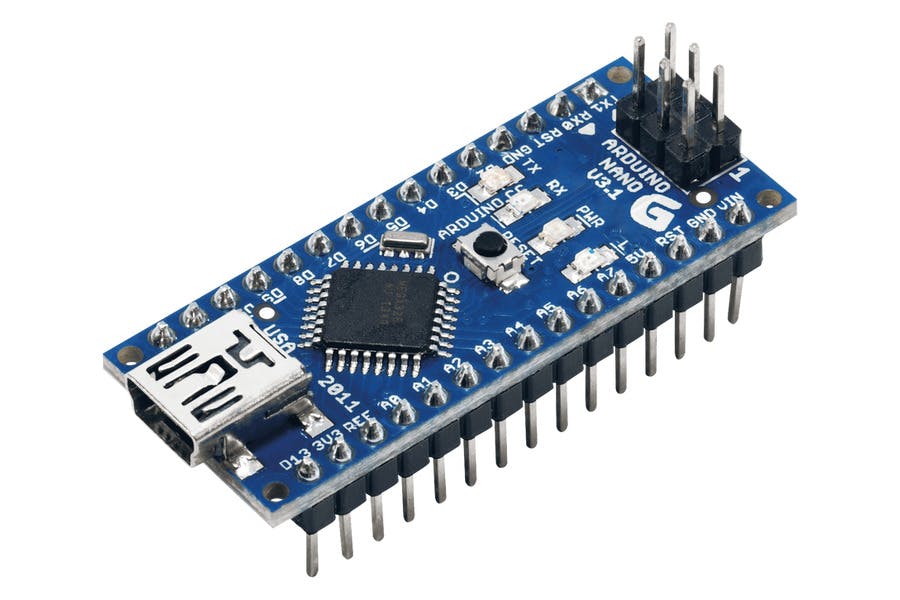
Arduino Nano R3
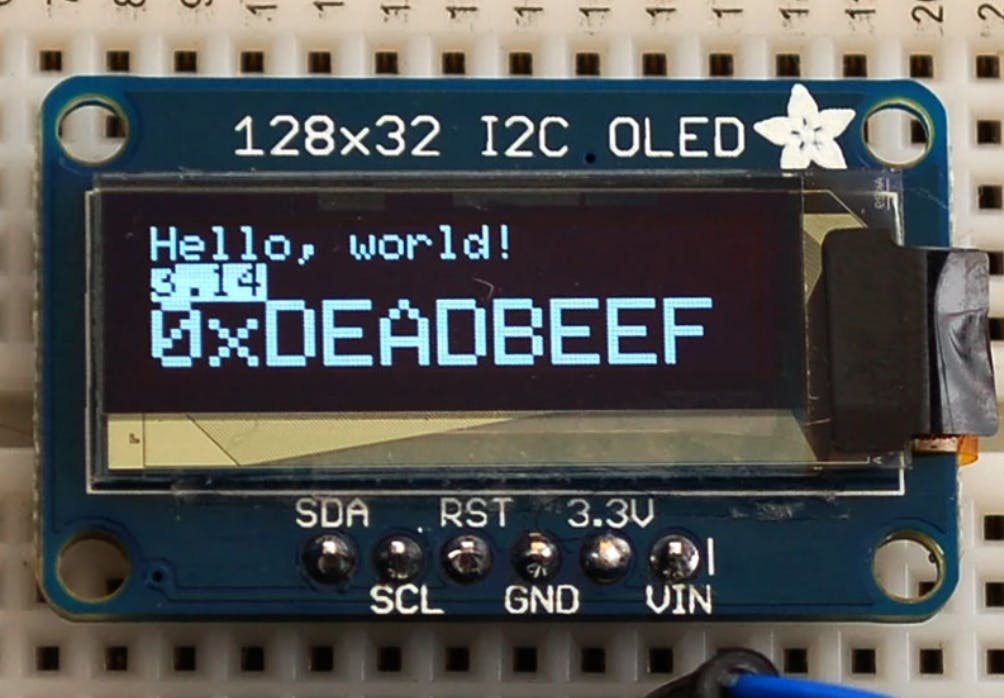
单色 128x32 I2C OLED 图形显示器
超声波距离传感器 - HC - SR04

Hitec HS-5055MG 9g 数字金属齿轮微型伺服

SPST 倾斜传感器

逐步构建过程
以下是构建声纳测绘设备的分步过程。
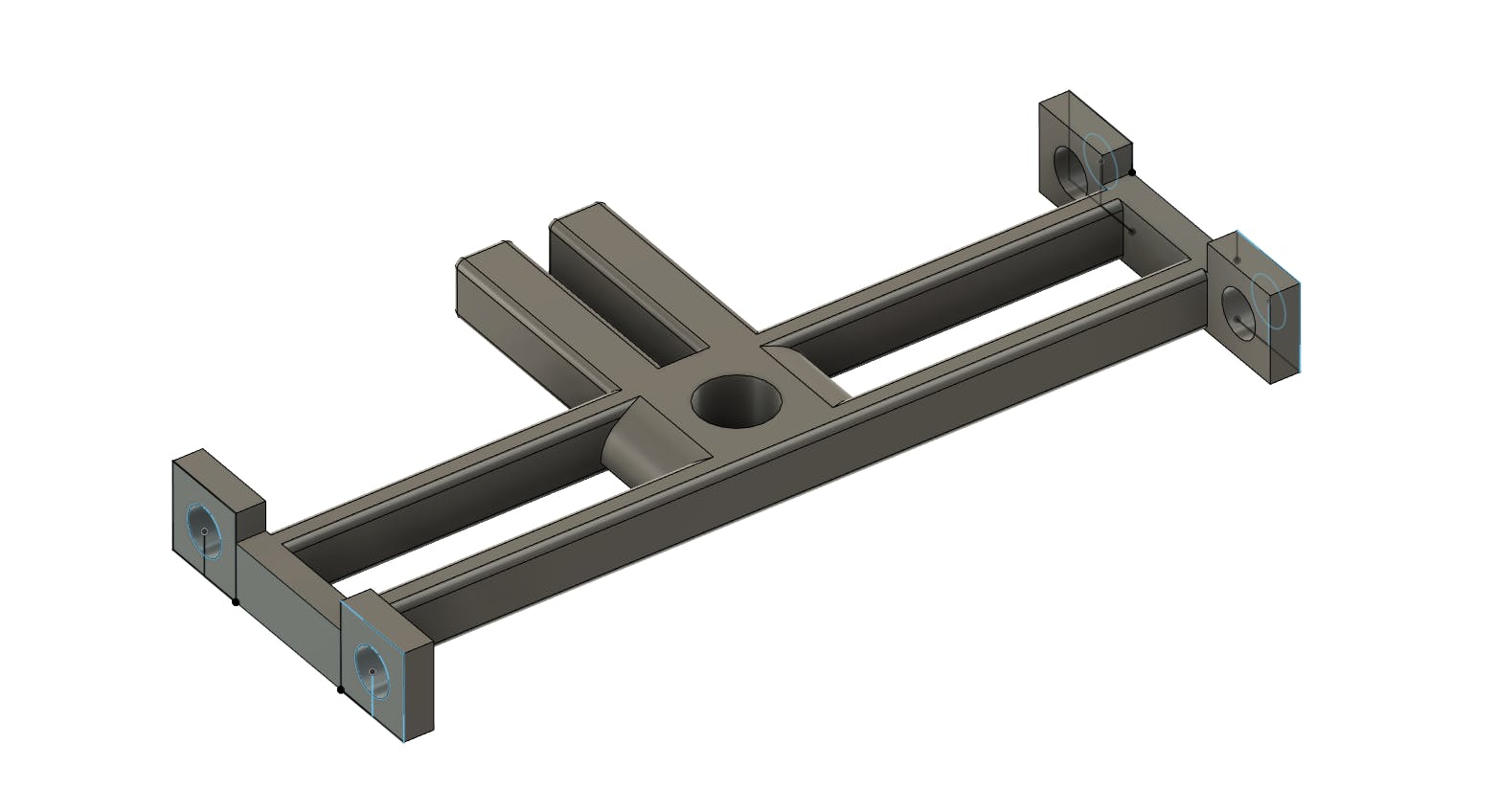
1. 3D打印零件
首先从项目的附件部分下载每个部分,然后使用切片器程序 (Cura 4.3) 对打印件进行切片。然后用 20% 的填充量打印它,任何部件都没有支撑。将需要打印三件,如下图所示。
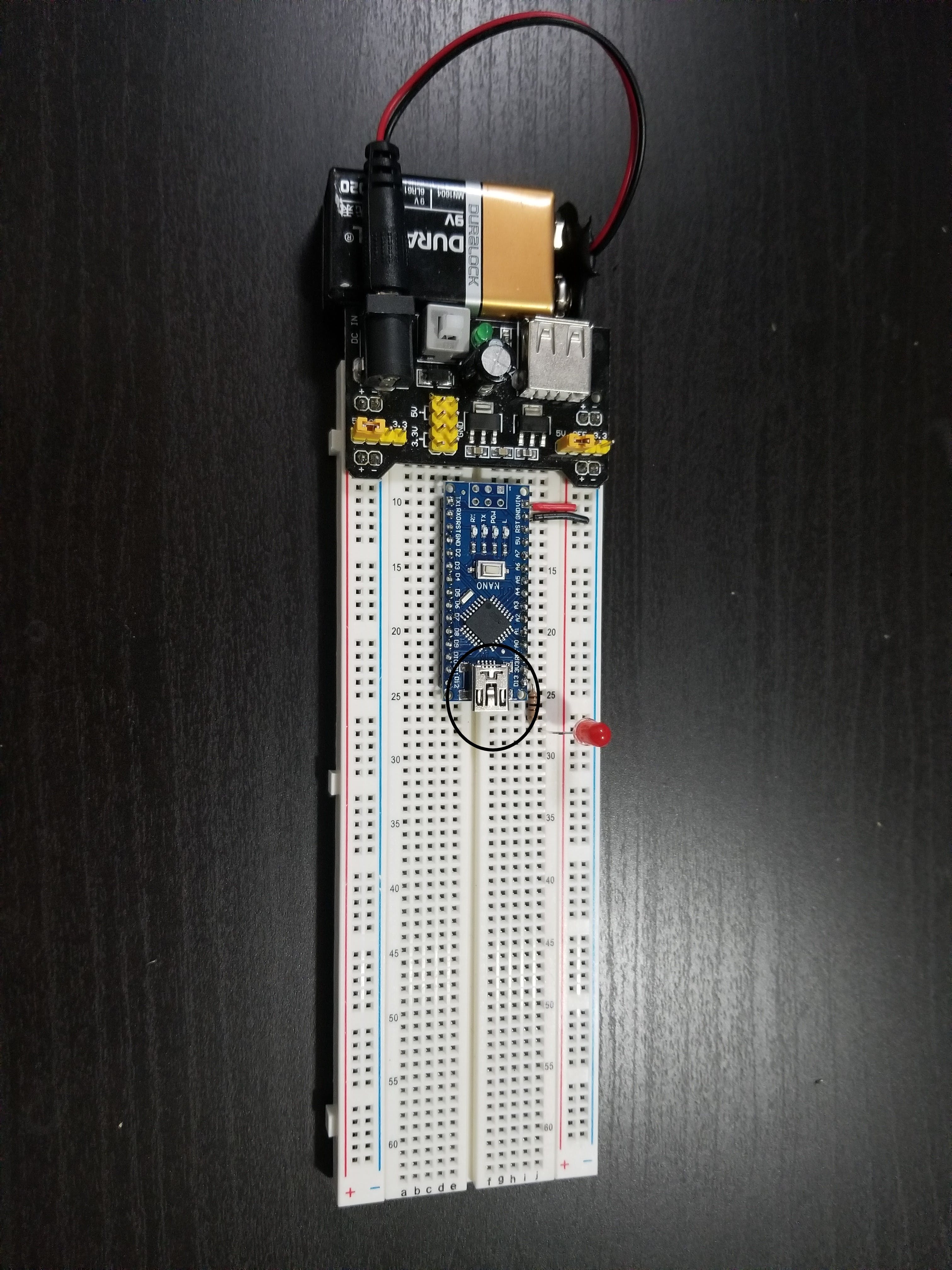
2. 连接电子设备
为电子设备接线是该项目的重要组成部分。Arduino 将由 9V 电池供电,您将连接 Monochrome 128x32 I2C OLED 图形显示器和 HC - SR04 超声波传感器到 arduino nano 板。对于超声波传感器,您将 VCC、GRD、TRIG、ECHO 焊接到 5V、GRD、数字 PWM、数字 PWM、. 对于 OLED 显示器,您需要将 GRD 连接到 GRD,将 VIN 连接到 5V,将 SDA 连接到 I2C 数据,将 RST 连接到数字引脚,将 SCL 连接到 I2C 时钟。如下图所示。
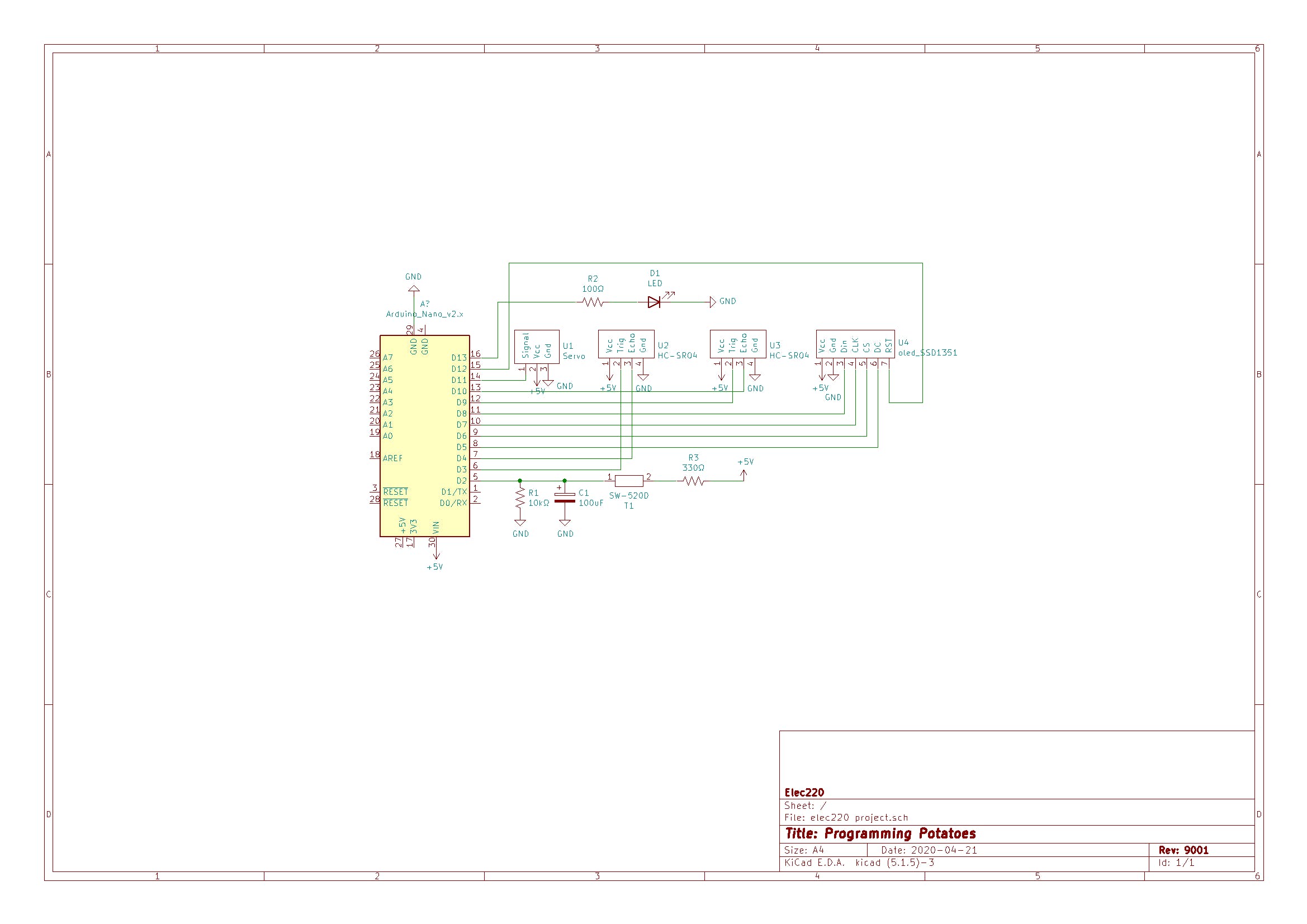
为倾斜传感器接线。
倾斜传感器的接线是它自己的部分,因为您必须添加一些电阻以实现与设备的最大一致性。倾斜传感器,您将 PWR 和 GRD 焊接到 arduino 的 PWR 和 GRD。您将并联两个电阻器,以实现倾斜传感器的最大一致性。
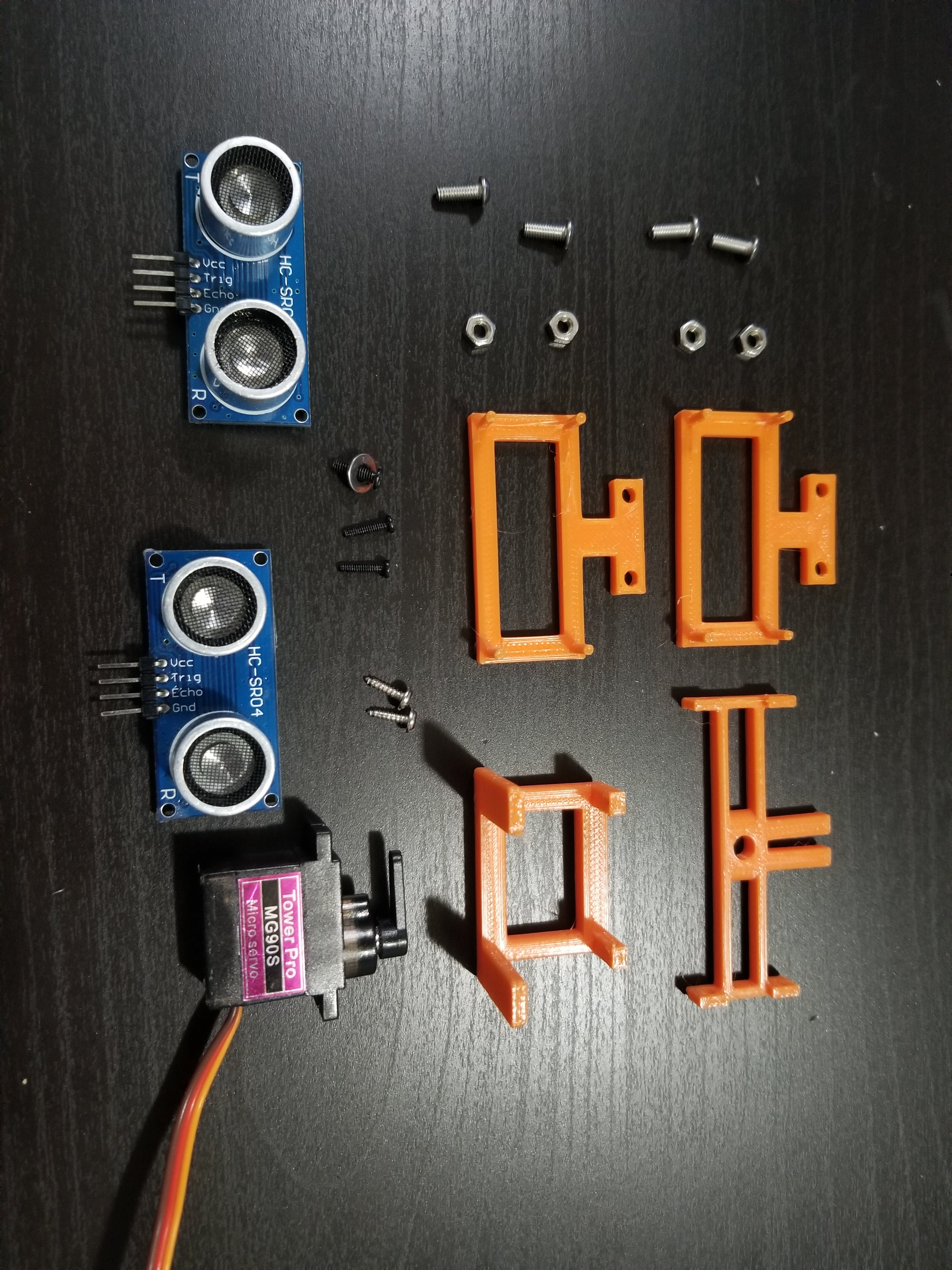
3. 组装设备
确保您拥有所有必要的部件。将声纳传感器安装到 3D 打印的声纳支架上。将声纳安装到伺服安装到伺服上。OLED 屏幕将与主设备分开。
一般零件:
声纳组件:
4. 上传代码
要上传代码,请安装伺服和数学库,然后从工具菜单中选择 Arduino Nano,然后选择上传。使用 Micro USB 转 USB-A 电缆将微控制器插入计算机。
这段代码初始化了一个包含 360 度极坐标信息的列表,当舵机旋转 180 度时,利用两个朝向相反方向的传感器更新所有坐标,并在 OLED 屏幕上显示极坐标。它不断来回旋转,并在每次改变方向后将坐标映射到屏幕上。
5. 使用设备
要使用该设备,请将其打开并将其放置在您想要映射的区域。舵机将自动旋转并开始将该区域映射到 OLED 屏幕上。在不同区域尝试或在附近添加对象,以查看地图在 OLED 显示屏上的变化。
。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




