
资料下载


×
基于SINS的车辆导航系统性能增强算法研究李晖
消耗积分:1 |
格式:pdf |
大小:616KB |
2017-03-08
#Freedom
分享资料个
基于SINS的车辆导航系统性能增强算法研究_李晖
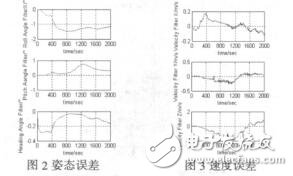
基于 SINS 的车辆导航方法,是利用相邻两个时刻间的相对运动状态来估算下一个时刻车辆姿态的一种相对定位方法。系统误差随时间积累,漂移大,使得车辆定位融合估计存在非线性及易发散的问题, 无法长时间得到高精度、高可靠性的导航参数。对 SINS 导航性能进行增强已成为研究热点。目前的研究主要有两方面。其一, 构建 SINS/GPS 组合导航系统。该方法已成为增强 SINS 车辆导航性能的常用方式。SINS/GPS 组合导航系统,能够有效提高整个系统的容错能力、位置信息可信度以及时间-空间覆盖范围,在车辆运行控制及定位等领域占据主导地位。其二,采用辅助约束条件,如速度方向约束、零速修正和路网约束等。辅助约束条件的引入,就是将制约车辆运动状态的条件引入到 kalman 滤波器的模型中,使得系统模型所表达的信息量更加丰富,使系统模型更加符合车辆的真实运动状况。本文设计一种带速度约束条件的 SINS 车辆导航滤波算法来增强 SINS 车辆导航系统的定位精度与持续工作能力,建立了具体的速度辅助约束方程,并进行了 Matlab 仿真实验。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





