
资料下载


使用光电传感和路径记忆进行车辆导航系统的设计资料说明
分享资料个
本文按照第一届“飞思卡尔”杯全国大学生智能汽车邀请赛的技术要求,研制了基于双排排列、模拟式光电传感器、具有前瞻性能的无人车辆导航系统,提出了基于路径记忆的转向和驱动控制算法,总结了智能车设计制作的经验。
为响应教育部关于加强大学生创新意识、合作精神和创新能力的培养的号召,清华大学汽车工程系积极组队参加了第一届“飞思卡尔”杯全国大学生智能汽车邀请赛。从2005年12 月开始着手进行准备,历时8 个月,研制了6 代基于光电传感器的路径识别方案,开发了智能车仿真研究平台,提出了基于路径记忆算法的转向及驱动控制策略,在电源管理、噪声抑制、驱动优化等方面也都进行了研究工作,通过大量的仿真试验、道路试验和基础性能测试,开发了基于光电传感和路径记忆的智能车导航系统,为整车系统的优良性能奠定了坚实基础。本文将从该智能车总体方案、路径识别方案选择、转向和驱动控制及路径记忆算法等方面进行介绍。
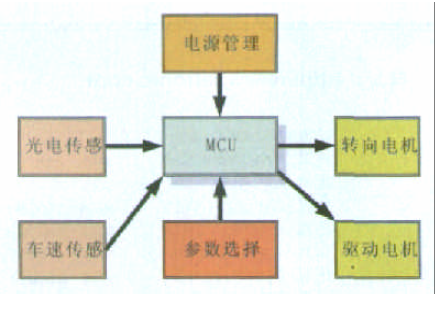
智能车系统以飞思卡尔公司的MC68S912DP256 为核心,由电源模块、传感器模块、直流电机驱动模块、转向电机控制模块、控制参数选择模块、单片机模块等组成,如图1 所示。智能车系统工作电压由+1.6V、+5V、7.2V三个系统混合组成,其中7.2V用于给驱动电机和转向舵机供电,5V 给车速传感器、MCU 以及光电传感器接收管供电,1.6V给发光管供电。为了在线控制参数的调整方便,还设置了一个控制参数选择模块,可以通过几个按键的设置,调用不同的程序或控制参数,以适应不同场地条件的要求。
智能车的工作模式是:光电传感器探测赛道信息,转速传感器检测当前车速,电池电压监测电路检测电池电压,并将这些信息输入单片机进行处理。通过控制算法对赛车发出控制命令,通过转向舵机和驱动电机对赛车的运动轨迹和速度进行实时控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





