
资料下载


×
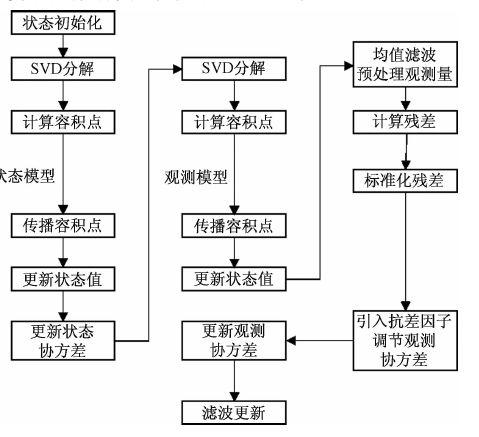
可提高导航系统稳定性的容积卡尔曼滤波算法
消耗积分:0 |
格式:pdf |
大小:2.92 MB |
2021-05-06
分享资料个
非线性动态系统存在非线性和噪声不确定的问题,容积卡尔曼滤波对解算该类系统有较好的精度,为了提升导航系统对异常观测值的稳定性,对采样欻据进行均值滤波处理,降低干扰较大的采样欻据对于滤波结果的影响。用奇异值分解代替〔 cholesky分解,改善滤波稳定性,避免先验协方差非正定而降低滤波性能。最后通过引λ抗差因子调节观测协方差矩阵,再次减少观测异常值对于滤波结果的影响。采用仿真实验进行分析,改进的抗差容积卡尔曼滤波算法对于减弱异常观测值影响有良好的效果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章







