
资料下载


×
如何使用人机交互平台实现移动服务机器人的导航系统
消耗积分:2 |
格式:docx |
大小:1.60 MB |
2020-10-10
麦少帅
分享资料个
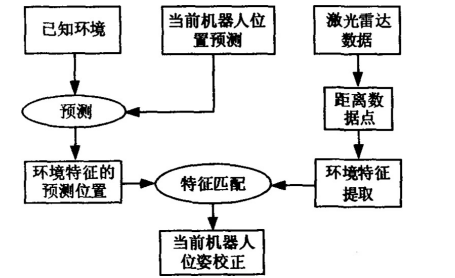
针对目前全自主移动机器人尚难实现的问题,基于人机结合的思想研制了由操作者、人机交互平台和移动机器人组成的“人一机一环境”一体化移动机器人导航系统·介绍了诙系统的结构组成,阐述了系统导航策珞,详细分析了人机交互、人机协作、移动机器人位姿預测及基于扩展卡尔曼滤波的位姿校正方法·设计了导航系统界面,通过在室内真实环境下的导航实验,验证了该“人一机一环境”一体化移动机器人导航系统的有效性·
服务机器人是一种半主或全自主工作的机器人,它能完成有益于人类的服务工作·室内移动服务机器人的导航一直是国内外研究的热点卩礼目前”全自主的智能移动服务机器人由于受到人工智能发展水平的限制尚难实现。鉴于移动服务机器人一般是一个“人一机一环境”系统,在这一系统中,人(服务对象)的参与和协调对提高系统的性能也是十分重要的本文围绕助老助残服务机器人,提出基于人机交互的人机智能融合方法·在这 ![]() “人一机一环境”一体化系统中,一方面移动机器人拥有位姿预测、位姿校正和防碰撞的能力,另一面操作者(服务对象)又可以通过友好的人机界面获取机器人反馈的多种信息并根据这些信息指挥、协调机器人的运动·
“人一机一环境”一体化系统中,一方面移动机器人拥有位姿预测、位姿校正和防碰撞的能力,另一面操作者(服务对象)又可以通过友好的人机界面获取机器人反馈的多种信息并根据这些信息指挥、协调机器人的运动·
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



