
资料下载


简易旋转倒立摆及控制装置设计
孙鹏博
分享资料个
简易旋转倒立摆及控制装置是复杂的高阶闭环控制系统,控制复杂度较高。系统以飞思卡尔MK10DN512ZVLL10单片机为核心,以Mini1024j编码器为角度传感器,配合直流电机组成旋转倒立摆系统,经过充分的系统建模,并考虑单片机运算速度,最终确定采用改进的“模糊PID”控制算法,通过软件控制,可以满足基本部分要求和发挥部分要求。
系统的突出特点在于充分的力学理论分析,通过力学建模和控制系统仿真,获得了大量的定性分析结果,为系统的建立提供了很好的理论依据。
系统方案论证与选择
倒立摆系统是一个复杂的快速、非线性、多变量、强耦合、自然不稳定的系统。对于该控制系统而言,合适的控制算法、精确的反馈信号、适合的电机驱动等都对系统的稳定性、控制精度及抗干扰性起重要作用。针对上述问题,分别设计多种不同的解决方案,并进行选择论证。
(1)控制算法选择
方案一:采用传统PID控制算法。
传统PID控制算法是运用反馈求和后的误差信号的比例(0阶位置项)、积分(误差累积项)、微分(1阶速度项)进行系统校正的一种控制算法。可用于被控对象的结构和参数不能完全掌握,或得不到的精确数学模型的情况,控制器的结构和参数必须依靠经验和反复调试来确定。
方案二:采用模糊PID控制算法
模糊PID控制算法根据PID控制器的三个参数与偏差e和偏差的变化ec之间的模糊关系,在运行时不断检测e及ec,通过事先确定的关系,利用模糊推理的方法,在线修改PID控制器的三个参数,让PID参数可自整定。将模糊控制算法与传统PID控制算法巧妙结合,不但具有PID控制算法精度高等优点,又兼有模糊控制灵活、适应性强的优点。
综合考虑选择方案二的模糊PID控制算法。
(2)电动机选型
方案一:选择步进电动机
步进电动机是将电脉冲激励信号转换成相应的角位移或线位移的离散值控制电动机,这种电动机每当输入一个电脉冲就动一步。虽然控制时序和驱动电路相对复杂,但步进距离很小,保持力矩大,制动能力强。但步进电机速度只在一定范围可调,并且一般步进电机在不旋转时仍有若干相通电,功耗太大。
方案二:选择直流电动机
直流电动机控制简单,利用双极性PWM即可实现调速和正、反转,功率调节范围广、适应性好。直流电机的起动、制动转矩大,易于快速起动、停车,易于控制,且直流电机的调速性能好,调速范围广,易于平滑调节。
综上考虑选择方案二的直流电动机。
(3)传感器的选择
方案一:使用角位移传感器
角位移传感器是一个高精度的电位器,它输出为模拟量。但是在使用角位移传感器时,为得到其与竖直方向(即重力方向)的夹角,要使用重摆,且在角度变化小时,由于传感器自身扭矩,将不会发生角位移,从而得不到采样数据。
方案二:使用主轴编码器
主轴编码器采用与主轴同步的光电脉冲发生器,通过中间轴上的齿轮1:1地同步传动。一般是发光二极管发出红外光束,通过动、静两片光栅后,到达光电二极管,接收到脉冲信号,变换成数字量输出。按编码方式不同,分为增量式编码器和绝对编码器。前者输出脉冲,后者输出8421码。绝对值编码器减轻了电子接收设备的计算任务,从而省去了复杂的和昂贵的输入装置,而且,当机器合上电源或电源故障后再接通电源,不需要回到位置参考点,就可利用当前的位置值,得到了广泛的应用。
综上考虑选择方案二的绝对值式主轴编码器。
2. 系统结构
基于题目要求及以上分析,本系统以飞思卡尔MK10DN512ZVLL10单片机作为核心处理芯片,包括摆杆状态检测、电机驱动、液晶显示等模块。系统框图如图1所示。
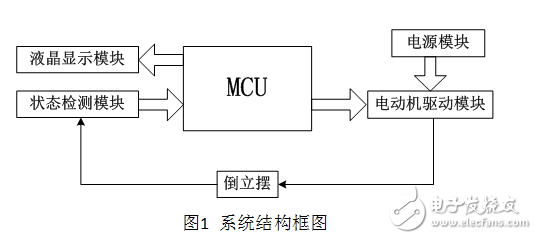
系统各部分功能如下。
中央处理模块:该模块采用飞思卡尔MK10DN512ZVLL10单片机作为主控制器,完成系统的控制功能。
摆杆检测模块:该模块由主轴编码器构成,用于检测摆杆的角位移及角速度,并将信息反馈给MCU。
电机驱动模块:该模块由步进电动机实现,用于驱动旋转臂做往复运动。
液晶显示模块:该模块由1.8寸SPI TFT全彩屏构成,用于实时动态显示摆杆角度,以及摆杆保持平衡状态后维持的时间。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





