
资料下载


机器人系统构成介绍
分享资料个
1、机器人的构成
是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系。
2、机器人的用途
Arc welding(弧焊),Spot welding(点焊),Handing(搬运),Sealing(涂胶),Painting(喷漆),去毛刺,切割,激光焊接。测量等。
3、FANUC机器人的型号
主要型号:型号轴数手部负重(kg) LR Mate 100iB/200iB 5/6 5/5 ARC Mate 100iB/M-6iB 6 6/6
ARC Mate 120IB/M-16iB 6 16/20 R-2000IA/M-710IAW 6 200/70 S-900IB/M-410IA 6/4 400
4、机器人的主要参数
1)手部负重
2)运动轴数
3)2,3轴负重
4)运动范围
5)安装方式
6)重复定位精度
7)最大运动速度
5、FANUC机器人的安装环境
1)环境温度:0-45摄氏度
2)环境湿度:普通:75%RH短时间:85%(一个月之内)
3)振动:=0.5G(4.9M/s2)
6、FANUC机器人的编程方式
1)在线编程
2)离线编程
7、 FANUC机器人的特色功能
1)High sensitive collision detector 高性能碰撞检测机能,机器人无须外加传感器,各种场合均适用
二、FANUC机器人的构成
1、 FANUC机器人软件系统

2、发那科硬件系统
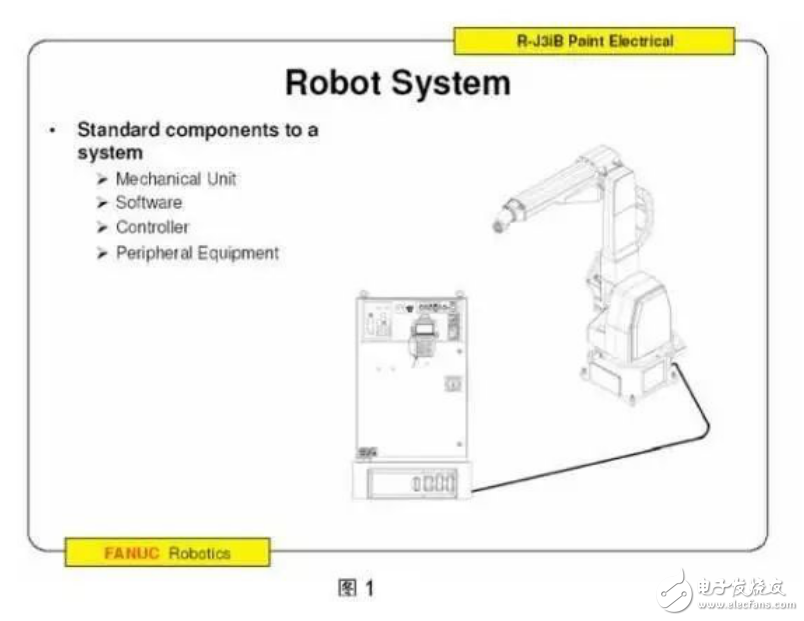
1)基本参数:马达交流伺服马达 CPU 32位高速输入电源 R-J3IB 380伏/3相:R-J3IB Mate 200伏/3相 I/O设备 Process I/O, Module A,B 等
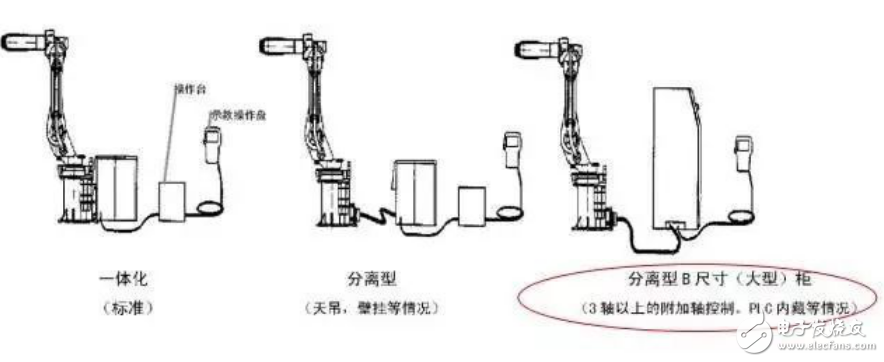
2)单机形式:(见图 1)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



