
资料下载


机器人几种视觉传感器的简介及应用
分享资料个
目前,在全世界的制造业中,工业机器人已经在生产中起到了越来越重要的作用。为了使机器人能够胜任更复杂的工作,机器人不但要有更好的控制系统,还需要更多地感知环境的变化。其中机器人视觉以其信息量
大、信息完整成为最重要的机器人感知功能。
机器人视觉伺服系统是机器视觉和机器人控制的有机结合,是一个非线性、强藕合的复杂系统,其内容涉及图象处理、机器人运动学和动力学、控制理论等研究领域。随着摄像设备性能价格比和计算机信息处理速度的提高,以及有关理论的日益完善,视觉伺服已具备实际应用的技术条件,相关的技术问题也成为当前研究的热点。
机器人视觉是使机器人具有视觉感知功能的系统。机器人视觉可以通过视觉传感器获取环境的一维、二维和三维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置及各种状态。机器人视觉视觉侧重于研究以应用为背景的专用视觉系统,只提供对执行某一特定任务相关的景物描述。机器人视觉硬件主要包括图像获取和视觉处理两部分,而图像获取由照明系统、视觉传感器、模拟-数字转换器和帧存储器等组成。根据功能不同,机器人视觉可分为视觉检验和视觉引导两种,广泛应用于电子、汽车、机械等工业部门和医学、军事领域。计算机视觉应用多采用光电传感器、视觉传感器或者视觉系统来实现。光电传感器结构简单,价格便宜,但是功能十分单一;基于PC机的视觉系统具有灵活的配置,并且具有优秀的处理性能和扩展能力,适合于各种视觉应用,但是系统相对比较复杂,开发周期长,价格也昂贵。视觉传感器则具有价格适中、开发简单、体积小巧、可扩展性强等优点。
视觉传感器通常是指综合了光学设备功能和图像处理功能的独立传感器,它在保持灵活性的同时提供准确的决策结果。视觉传感的工作原理如图1所示,其工作流程分为三步。采集:摄像头捕获对象或者对象上某一部分的图像;分析:图像传输到存储器中进行处理、分析并和预设的参数进行比较;决策:传感器基于用户设定的容错参数进行决策,最后输出结果。
视觉传感器与光电传感器的传感模式相同,只是前者需要外置的光源。但是光电传感器只能产生一束光,即只能检测某一个点;而视觉传感器可以检测某一个区域并产生数以千计的像素,而且通过调节传感器镜头可以改变检测区域的大小,在多点检测应用场合下只能使用视觉传感器。视觉传感器还拥有很强的分析能力。它可以分析图像的形状、大小和位置,能广泛应用于测量应用、模式匹配和视觉运动导向。视觉传感器也具备强大的通讯功能,它不仅能够输出数字信号和模拟信号,也可以通过串口VGA(Video Graphics Array)接口或以太网口等标准通讯口传输大量数据,包括被检测部件的特征信息和数字图像等等。当然,完善的视觉系统具有性能更高的硬件和通用性更好的软件。 PC架构的图像处理系统的优势主要体现在其通用性、可扩充性、灵活性上。在一些高速(100帧以上)、高分辨率(百万像素以上)或检测算法复杂、需要大存储器的应用场合,视觉传感器有时就难以胜任。但是,视觉系统价格昂贵,软件需要定制,其开发工作复杂,开发周期长,从而限制了它的应用场合。
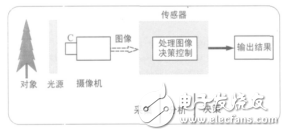
图1 视觉传感器工作流程
Fig. 1 Work flow of vision sensors
视觉传感器并非为特定应用而设计,它易于从一个应用移植到另一个应用,而且视觉传感器的设置、组态和支持都非常简单,生产线上的人就可以完成这些工作。随着微处理器、DSP、FPGA运算能力的增强,存储器集成度增加和成本的降低,视觉传感器检测软件的功能不断丰富,视觉传感器的应用领域不断扩展,已经逐渐进入了原PC架构的图像检测领域,如精密测量、质量检测、零件分类及定位等。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





