
资料下载


使用红外传感器的避障机器人
h1654155143.8331
分享资料个
描述
所以几天前,当我尝试使用它时,我的超声波传感器停止工作并开始输出 0。我做了很多研究来尝试修复它(降低电压,新 ping 库等)但无济于事(如果你们中的任何人都知道如何解决这个问题,请将其放在下面的评论中)。
没有被吓倒,我决定使用红外接近传感器制作一个避障机器人。它们恰好也更便宜(虽然不是很大),而且我确实从我的线路跟随机器人那里得到了一些。
目标很简单——如果传感器遇到障碍物,它们会后退并视情况向左或向右转。
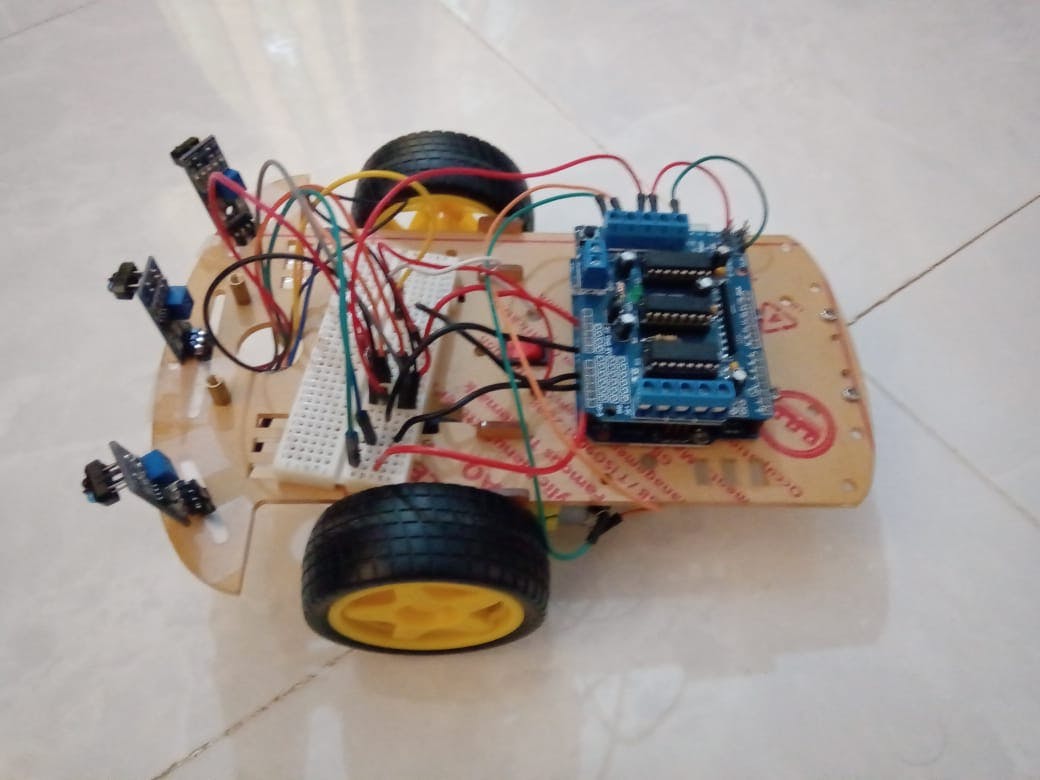
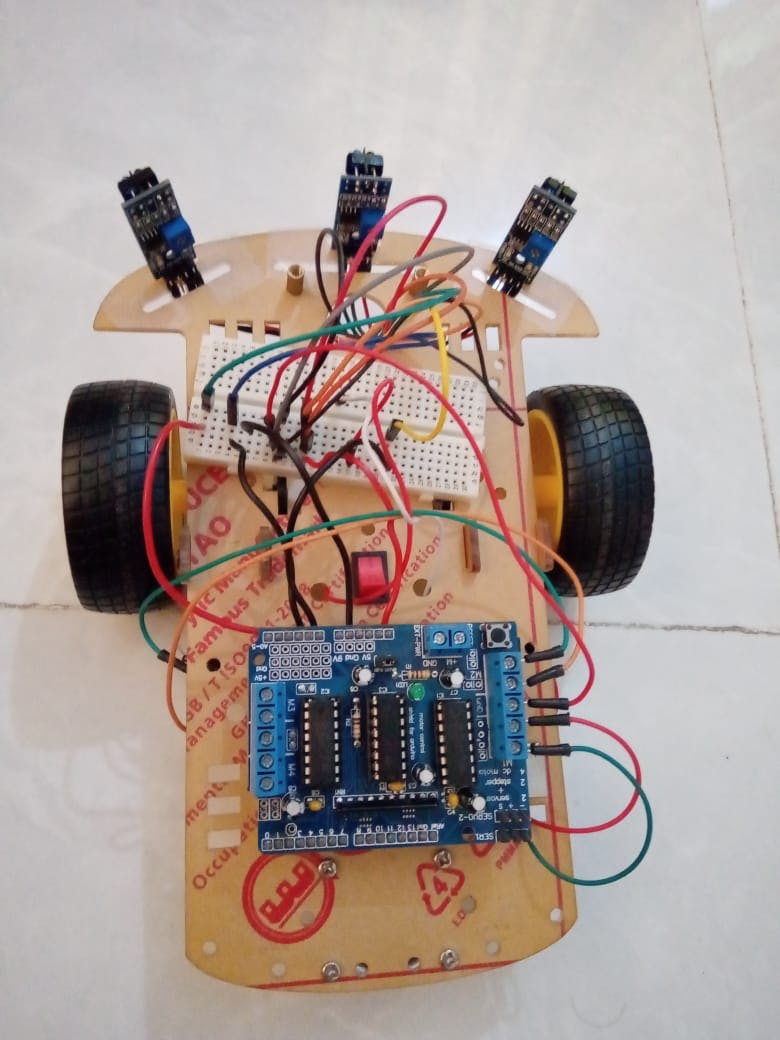
所以我将三个传感器分别称为左、中、右三个传感器 sL、sM 和 sR。
连接相当直接 -
所有 3 个 IR 传感器都从 Arduino 接收 3.3V(我没有冒 5V 的风险,尽管我被告知不会有问题)并连接到同一个 GND 引脚。
sR 连接到 A0
sL 连接到 A2
sM连接到A5
右侧电机连接到电机护罩的 M1,左侧电机连接到 M2。
一旦这一切都完成了,机器人就可以开始了。
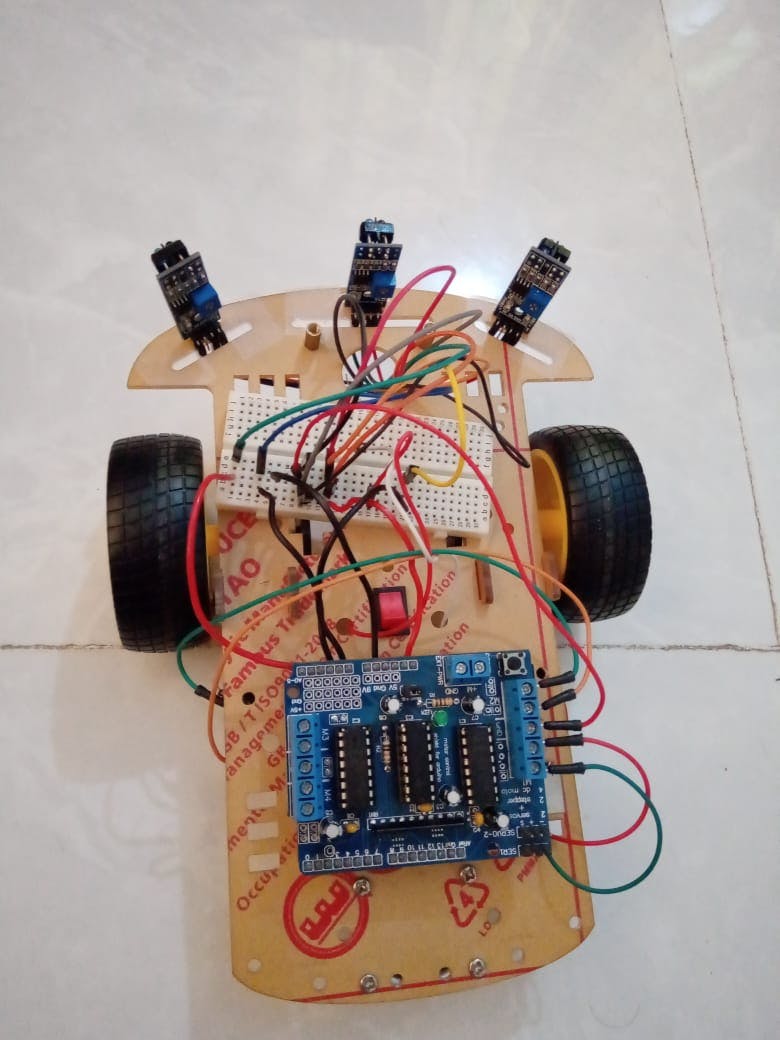
重要的-
如上所示的红外传感器已被证明在其任务中是有效的。但是我必须解决一个非常重要的问题。红外接近传感器受外部光的影响很大。在我的代码中,如果传感器值是,机器人会避开障碍物低于 600。但是,此值会根据您工作和尝试机器人的地方的外部照明而变化。我强烈建议您首先在您的 Arduino 上运行模拟读取串行代码,确定正确的阈值并在您的程序中使用它。在事实上,这是使用红外线传感器而不是超声波传感器的主要缺点之一。请注意这一点。
.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





