
资料下载


×
基于视觉传感器的路障自收放机器人系统
消耗积分:3 |
格式:rar |
大小:1.17 MB |
2018-01-19
分享资料个
日常生活中,为了尽量减轻事故处理人员和驾驶员的负担,减少在收放路障过程中发生事故的风险,工作人员想到了用机器人来进行路障的收放,但目前国际上通过机器人收放路障的应用还未见报道。本课题组提出基于视觉传感的路障自动收放控制方法,并通过总体方案,各结构设计与选用,开发出一套控制精度较高,适用于公路的路障自动收放装置,即移动平台与机械手爪和视觉传感器相结合的联合平台,并进行效果验证。本项目有很大的创新空间,系统的应用将有较好的市场前景。
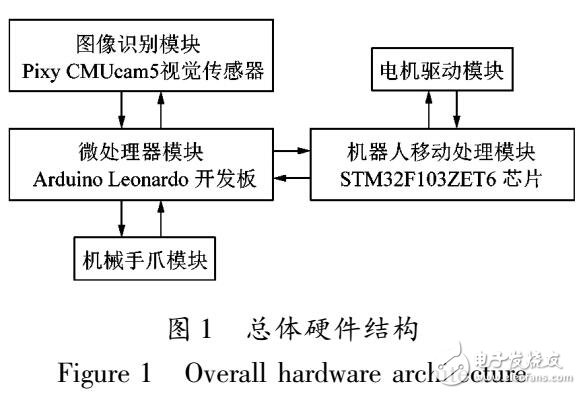
高速公路路障摆放与回收是高危作业,为减少公路上交通事故的发生,课题组设计并开发了基于Arduino和PixvCMUcam5视觉传感器的路障自收放机器人系统,由移动机器人平台搭载手爪自由移动来实现路障的合理摆放与收回。通过移动平台上路障收放装置的合理设计,并通过网络控制接口与机器人平台上的图像采集与识别模块实现通信,将视觉传感器捕捉到的路障的三维空间位置信息传送给微处理器,控制移动机器人移动定位,手爪配合实现路障收放。该路障自牧放系统具有很强的实用性,可实现路障摆放和回收无人操作。该设计可提高公路作业的安全性,有一定的推广意义。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





