
资料下载


×
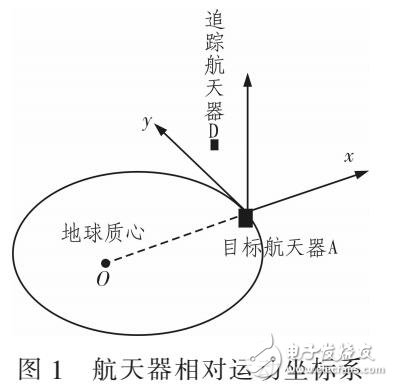
近圆轨道下航天器相对运动的滑模控制(通过MATLAB验证)
消耗积分:0 |
格式:rar |
大小:1.13 MB |
2017-10-30
分享资料个
随着第一套航天纪念钞的发行,航天领域以及航天技术的发展已经具有越来越重要的意义。中国的航天活动也愈来愈频繁。在国家即将发射长征七号、天宫二号、神州十一号和将要实施嫦娥五号计划,以及中国空间站即将投人使用的大背景下,航天器相对运动问题的研究更具有时代意义。
滑模控制出现于上个世纪60 年代,经过世界各国各个年代领域新秀、资深专家学者的研究,目前各个分支领域已经在两个世纪的研究中逐渐相对独立,并且这种设计方法已经被各自领域人士重视及应用。滑模控制方法本身,可以根据自需选取适当的滑模切换面例和控制律,能够快速对输人的变换进行响应是自身的一大优势,且具有很好的鲁棒性。所以,用滑模控制方法研究航天器相对运动问题意义重大。文中在此趋势下,合理地设计了近圆轨道情形理想状态下的航天器相对运动滑模控制器,在两航天器的完全交会背景下,验证了控制器系统是可行有效的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





