
资料下载


×
基于CPLD+DSP的实时数字图像稳定系统设计方案
消耗积分:1 |
格式:rar |
大小:0.4 MB |
2017-11-01
分享资料个
数字图像稳定是图像序列处理中得一项重要的前处理步骤。早期的方法是对摄像机本身的机械和光路进行稳定,随着数字技术的发展,可以对采集到的图像进行处理,使图像在显示器上能够稳定地显示,同时也为了更好地为后续处理提供稳定的图像序列,如图像拼接、图像增强、信息融合、目标追踪、目标识别等各种图像处理技术的综合运用。在实现实时图像稳定系统方面,由于图像计算量大,必须选用高性能数字信号处理器。目前实现实时图像处理的主要方式有4种:1)基于通用PC机;2)基于通用DSP;3)基于专用或多DSP;4)基于可编程FPGA或DSP+FPG。在通用PC机上可方便地进行各种图像算法的仿真试验,但是这种方法只能在实验室进行,难以现场应用。其中基于通用DSP这种方案的优点在于,价格便宜、资料丰富、开发相对简单,并且处理速度也随着器件性能提高,已经能满足图像稳定所需要的实时处理,形成脱机系统。针对实时数字图像稳定处理,介绍一种采用高性能系列的DSP C6416,开发出一套数字图像处理系统。该系统采用双口RAM作为高速数据输入输出缓冲通道,由CPLD进行系统的逻辑控制,DSP的EDMA完成数据的片内片外传送,通过配置和软件优化,最终完成了系统的高度实时运行。
1 稳像方法和步骤
数字图像稳定处理过程主要由3部分组成:运动矢量估计模块(ME),运动矢量补偿模块(MC)和图像序列合成模块(IC)。通过ME模块找到帧间运动偏移,由MC模块进行图像拼接完成运动补偿,最后经IC模块进行图像剪裁输出。
运动矢量估计模块中,通过比较当前图像和参考图像中相同的部分,找到两帧图像问的偏移量,即运动矢量,广泛应用于视频处理与编码,如图1所示。
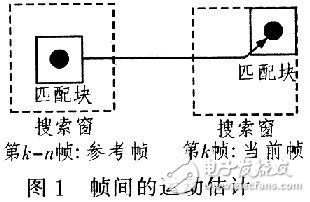
图1中用实线所画的方框表示匹配块,虚线所画的方框表示搜索窗。假定第k帧为当前帧,为了计算第k帧相对于第k-n帧的运动偏移量。在第k-n帧的中心位置选择一个N×N像素大小的匹配块,同时在第k帧上选择一个M×M(M》N)大小的搜索窗,搜索窗的中心位置与第k帧的匹配块中心位置重合,通过用式(1)比较两幅图像间所有相应像素间绝对差的累和VSAD(Sum of Absolute Difference),在搜索窗内找出和匹配块图像最匹配的位置,即VSAD最小值的位置。该匹配位置坐标和搜索窗中心点坐标的相对位置(△x,△y),即为两帧图像的偏移运动矢量。
1 稳像方法和步骤
数字图像稳定处理过程主要由3部分组成:运动矢量估计模块(ME),运动矢量补偿模块(MC)和图像序列合成模块(IC)。通过ME模块找到帧间运动偏移,由MC模块进行图像拼接完成运动补偿,最后经IC模块进行图像剪裁输出。
运动矢量估计模块中,通过比较当前图像和参考图像中相同的部分,找到两帧图像问的偏移量,即运动矢量,广泛应用于视频处理与编码,如图1所示。
图1中用实线所画的方框表示匹配块,虚线所画的方框表示搜索窗。假定第k帧为当前帧,为了计算第k帧相对于第k-n帧的运动偏移量。在第k-n帧的中心位置选择一个N×N像素大小的匹配块,同时在第k帧上选择一个M×M(M》N)大小的搜索窗,搜索窗的中心位置与第k帧的匹配块中心位置重合,通过用式(1)比较两幅图像间所有相应像素间绝对差的累和VSAD(Sum of Absolute Difference),在搜索窗内找出和匹配块图像最匹配的位置,即VSAD最小值的位置。该匹配位置坐标和搜索窗中心点坐标的相对位置(△x,△y),即为两帧图像的偏移运动矢量。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





