
资料下载


×
基于DSP的自动避障小车的设计方案
消耗积分:1 |
格式:rar |
大小:0.6 MB |
2017-11-02
分享资料个
近年来研究移动机器人倍受重视,仿照生物功能发明的各种移动机器人越来越多,小到娱乐机器人玩具、家用服务机器人,大到矿产勘测、工程探险、军事侦察机器人等。避障小车是一种移动机器人,它通过传感器系统感知外界环境,在复杂环境中自主移动并完成避障,一般采用超声波、红外、激光、CCD等传感器设计。由于红外传感器探测视角小。方向性强,测量精度高,价格便宜,而且可在夜间工作,因此红外传感器作为视觉应用于移动机器人避障。本设计是以TI公司生产的TMS320LF2407型DSP为核心,采集环境信息并控制智能小车,3个红外发收传感器检测智能小车前方的障碍物,并且根据障碍物位置进行自动避障。
1 自动避障小车总体设计
该系统主要由DSP控制、电机驱动、电源、测速以及视觉等模块组成,其结构如图1所示。
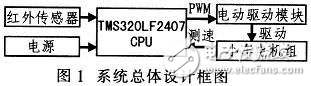
小车为3轮结构,前面2个轮分别由2个电机独立驱动控制,后面1个万向轮作为支撑轮。小车安装有3个红外传感器,分别位于车头的左、中、右部位,用于采集环境信息。车体规格为:车身板距地7.5 cm,车长25 cm,车宽12 cm,车轮半径5.5 cm。速度控制采用定频调宽的PWM调速,并应用速度反馈和闭环PID控制,从而实现小车精确的速度和位置控制。
2 自动避障小车的硬件设计
该系统以DSP TMS320LF2407A为核心,该DSP片内资源丰富,具有电机控制的独特资源,12路脉宽调制(PWM)输出。视觉模块采用E3FDS3-0P1型红外传感器,有效探测距离为30 cm,探测角度30°。将3个红外传感器分别接至I/OPE接口的I/OPE4、I/OPE5和I/OPE6。由于光电开关正常状态时信号高电平为5 V,而DSP标准高电平为3.3 V,所以应在光电开关与DSP之间串联分压电阻。电源采用12 V蓄电池供电。DSP是以+3.3 V电压供电,因此必须将+12 V标准电压转换成+3.3 V。该系统采用LM7805与MAX604作为电源转换器。12 V电源首先经LM7805调压到5 V,先将5 V电压送入红外传感器,再送入MAX604降压为3.3 V,如图2所示。
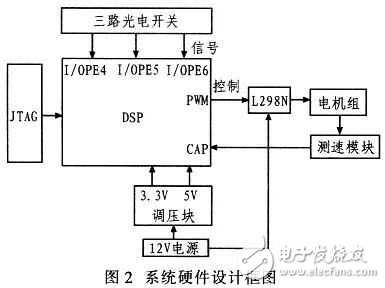
采用L298驱动电机,0UTl,0UT2分别与小车的一个电机的正负极相连;OUT3,OUT4分别与小车的另一个电机的正负极相连;L298的INl和IN2引脚分别与DSP的IOPE0(方向4)、IOPE1(方向3)引脚连接,用于接收主控器件输出的转向电机的动作指令,并通过0UTl和OUT2控制左电机的正转与反转,L298的IN3,IN4引脚分别与DSP的IOPE2(方向2)、IOPE3(方向1)引脚连接,用于接收主控器件输出的驱动电机的动作指令,并通过0U113,OUT4控制前方右电机的正转与反转,而ENA和ENB引脚分别连接到DSP的IOPE0(PWM3)、IOPEl(PWM4)引脚,用于控制电机的速度,
1 自动避障小车总体设计
该系统主要由DSP控制、电机驱动、电源、测速以及视觉等模块组成,其结构如图1所示。
小车为3轮结构,前面2个轮分别由2个电机独立驱动控制,后面1个万向轮作为支撑轮。小车安装有3个红外传感器,分别位于车头的左、中、右部位,用于采集环境信息。车体规格为:车身板距地7.5 cm,车长25 cm,车宽12 cm,车轮半径5.5 cm。速度控制采用定频调宽的PWM调速,并应用速度反馈和闭环PID控制,从而实现小车精确的速度和位置控制。
2 自动避障小车的硬件设计
该系统以DSP TMS320LF2407A为核心,该DSP片内资源丰富,具有电机控制的独特资源,12路脉宽调制(PWM)输出。视觉模块采用E3FDS3-0P1型红外传感器,有效探测距离为30 cm,探测角度30°。将3个红外传感器分别接至I/OPE接口的I/OPE4、I/OPE5和I/OPE6。由于光电开关正常状态时信号高电平为5 V,而DSP标准高电平为3.3 V,所以应在光电开关与DSP之间串联分压电阻。电源采用12 V蓄电池供电。DSP是以+3.3 V电压供电,因此必须将+12 V标准电压转换成+3.3 V。该系统采用LM7805与MAX604作为电源转换器。12 V电源首先经LM7805调压到5 V,先将5 V电压送入红外传感器,再送入MAX604降压为3.3 V,如图2所示。
采用L298驱动电机,0UTl,0UT2分别与小车的一个电机的正负极相连;OUT3,OUT4分别与小车的另一个电机的正负极相连;L298的INl和IN2引脚分别与DSP的IOPE0(方向4)、IOPE1(方向3)引脚连接,用于接收主控器件输出的转向电机的动作指令,并通过0UTl和OUT2控制左电机的正转与反转,L298的IN3,IN4引脚分别与DSP的IOPE2(方向2)、IOPE3(方向1)引脚连接,用于接收主控器件输出的驱动电机的动作指令,并通过0U113,OUT4控制前方右电机的正转与反转,而ENA和ENB引脚分别连接到DSP的IOPE0(PWM3)、IOPEl(PWM4)引脚,用于控制电机的速度,
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





