
资料下载


×
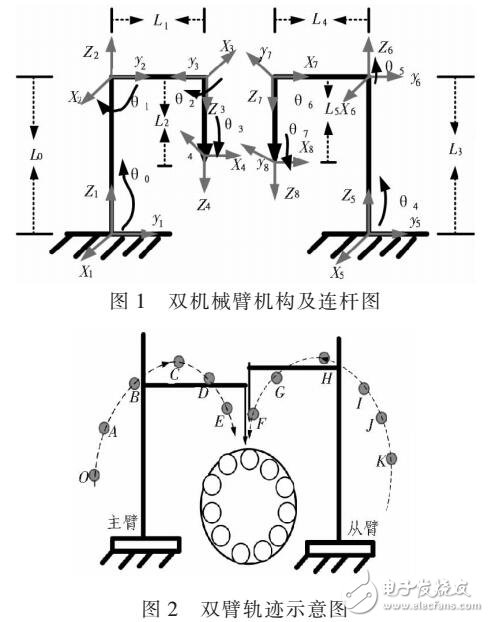
双机械臂运动轨迹优化方法
消耗积分:0 |
格式:rar |
大小:0.86 MB |
2017-11-03
分享资料个
机械臂的运动轨迹是指通过给定的路径的起点与终点,以及机构本身或者机构运行所存在的约束条件,求出每个关节的位移S,速度v,加速a的完整过程。
文中采用笛卡尔空间的网弧插值法使得机械臂运动平滑。笛卡尔空间的规划与机械臂目标点的坐标位姿函数相关,必须通过机械臂的逆向运动学求解,如此可获取各个关节变量的函数。笛卡尔空间的轨迹规划方法中的网弧插值法适用于所研究主从机械臂运动状态,主从机械臂最基本的要求是在起点与目标点的速度为零,两机械臂运行平滑,时间和速度保持最优的情况下,主从机械臂同步运行且不发生碰撞的现象。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(1)
发评论
-
 小风车_1e6
2020-12-14
0 回复 举报听说发评论,可以免费下载,是的吗,有没有人能告诉我呢 收起回复
小风车_1e6
2020-12-14
0 回复 举报听说发评论,可以免费下载,是的吗,有没有人能告诉我呢 收起回复
- 相关下载
- 相关文章





