
资料下载


×
基于DSP的磁悬浮系统的设计
消耗积分:0 |
格式:rar |
大小:0.2 MB |
2017-11-13
分享资料个
本文主要讨论由 DSP 为核心构建的磁悬浮系统,并详细分析控制系统的两个关键要素:主控器和悬浮驱动器。在设计中,这两部分我们分别采用数字处理芯片TMS320LV5402 和两象限桥式悬浮斩波器。最后分析了具体数字实现中应注意的问题。
1.控制系统的构建:
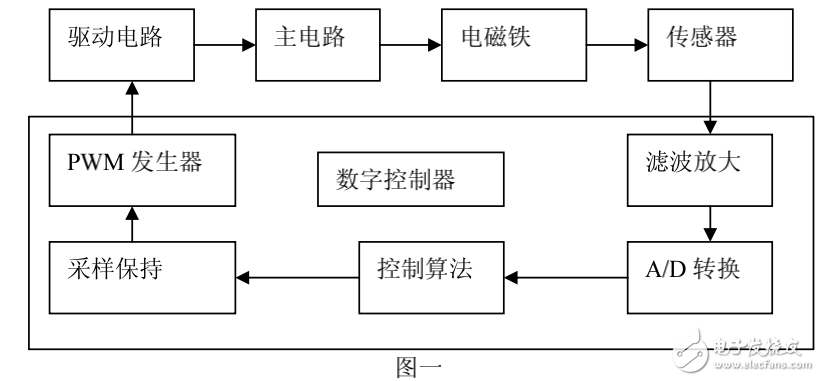
图一为单电磁铁控制系统的结构图。电磁铁的可控量为其线圈的端电压,通过改变线圈电流,改变气隙磁密,从而改变电磁吸力的大小。由于电磁铁的动力学模型是三阶不稳定系统,故在开环情况下,系统是不稳定的,必须对电磁铁的气隙进行反馈控制,才能保持气隙恒定。控制系统的工作原理为:首先通过气隙传感器检测电磁铁的气隙变化,模数转换后,进行数字滤波并放大,再与控制的给定值比较获得到偏移量,采取一定的控制算法(本试验中采用的是改进型 PID 控制),获取控制量,此控制量通过 PWM 发生器,产生 PWM 波驱动主电路,改变电磁铁两端的电压,从而改变电磁线圈的电磁吸力的大小,以控制被悬浮物体的稳定悬浮。结构图中方块内部为整个数字控制器。从以上分析可知,此系统中控制器和主电路的选取,对整个电路的刚度、实时性和稳定性有着重要意义。下面就这两个方面进行分析。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





