
资料下载


×
相控阵雷达导引头的介绍及其数字平台设计
消耗积分:0 |
格式:rar |
大小:1.1 MB |
2017-11-16
分享资料个
相控阵雷达导引头是未来导引头发展的一个重要领域,为了消除弹体扰动对导引头测量误差的影响,实现相控阵雷达导引头的捷联去耦,设计了一种相控阵雷达导引头捷联去耦数字平台,采用基于四元数法求取弹体的姿态角,采用相控阵雷达导引头波束扫描稳定算法实现对波束扫描误差的补偿,达到导引头捷联去耦的目的,并在MATLAB中对四元数法和波束扫描稳定算法进行了仿真验证,取得了较好的去耦效果,该相控阵雷达导引头捷联去耦数字平台具有原理简单、算法运算量小和去耦效率高的特点。
1捷联去耦数字平台原理
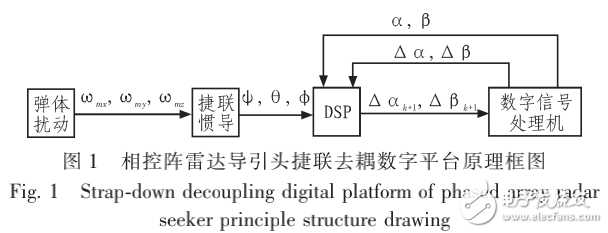
相控阵雷达导引头数字捷联平台的基本功能是隔离弹体运动及外部扰动对天线在惯性空间指向的影响,它的基本原理是通过惯性测量单元采集弹体运动的姿态参数(偏航角、俯仰角和滚转角).根据弹体现态对运动姿态参数进行坐标变换,据此计算波束修正量,依据导引头数字信号处理机发来的波束指向码及姿态修正量,对移相器实现波束的实时控制,从而使天线无扰动地跟踪目标视线。
本文设计的相控阵雷达导引头捷联去耦数字平台原理框图如图1所示。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




