
资料下载


基于FPGA的多轴步进电机控制器的设计
分享资料个
提出一种应用现场可编程门阵列(FPGA)实现多轴步进电机控制器的方法。采用IP设计思想,步进电机的运动控制由硬件电路(步进电机IP核)实现,轨迹计算由同一芯片上的微处理器(Nios II软核)实现,从而可以构建多轴步进电机控制器的可编程片上系统(SOPC系统)。利用VHDL硬件描述语言,设计了一种高性能步进电机IP核,并进行了仿真验证。为了验证该IP核的复用性,构建了一个4轴步进电机控制器的SoPC系统。实验结果表明,此系统可对多轴步进电机实现高精确度控制,每轴的运动是相互独立的,并且控制参数在线可编程。基于这种方式构建的系统,扩展方便、可移植性高、具有广泛的适用性,可用于多轴伺服系统的工业领域。
步进电机IP核
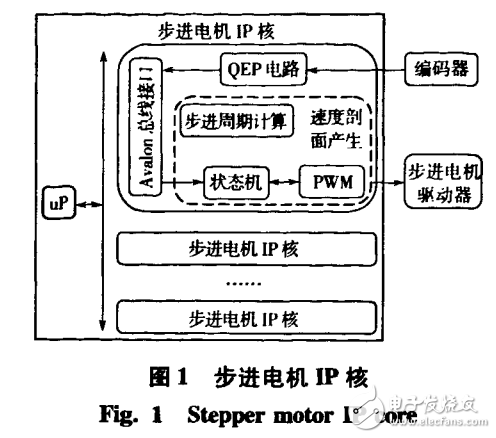
通过设定其内部寄存器值,步进电机IP核能控制步进电机按设定的速度曲线模式运行。该IP核有3个主要功能模块构成.如图1所示。
1)Avalon总线接口:它使该IP核具有Avalon总线接口,可与其它具有相同接口的IP核互联。
2)QEP电路:用于连接一个光电编码器获取电机转子位置等信息,用于判断电机运行是否失步,使本系统可根据用户需要成为闭环控制系统。
3)速度剖面产生:根据设定的速度曲线参数,计算出每个步进脉冲的步进周期,并输出步进脉冲序列到步进电机驱动器,从而驱动步进电机按设定的速度曲线模式运行。它由状态机,步进周期计算模块和PWM电路三部分构成。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






