
资料下载


×
飞行器摄像头模块设计及自适应循迹算法研究
消耗积分:3 |
格式:rar |
大小:3.09 MB |
2018-01-18
分享资料个
四旋翼飞行器稳定飞行控制是近年来新兴的研究方向,特别是飞行器沿黑线稳定循迹成为科研工作者研究的热门话题飞行器从4区起飞,沿直线径直飞至B区;或者飞行器从4区起飞,沿外环顺时针方向飞行到达B区,然后继续沿外环顺时针方向飞回至4区然后降落。要完成循迹飞行任务,飞行器除了具备稳定的姿态控制系统外,还需具备能实时识别循迹路线的循迹模块装置。
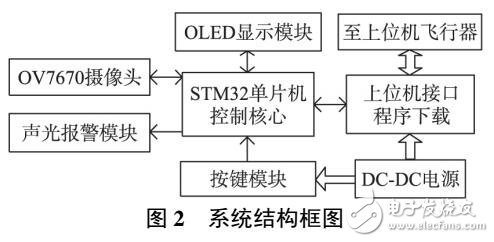
针对四旋翼飞行器循迹较为复杂、姿态难以控制的问题,设计了一套完整的摄像头循迹系统模块。采用独立的STM32单片机系统进行控制,提高了工作效率。对循迹路线进行了分析简化,得出四幅场景图像,给出了判别依据:仅需对图像横向扫描然后判断等差数列的个数,以及是否扫描到黑线的情形来判断区分四幅图像,简化了图像识别步骤,提高了程序执行效率及可靠性。PID调节实验结果表明,该摄像头循迹模块具有较强的自适应抗干扰能力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





