
资料下载


×
机器人的曲线焊接系统
消耗积分:3 |
格式:rar |
大小:0.51 MB |
2018-01-23
分享资料个
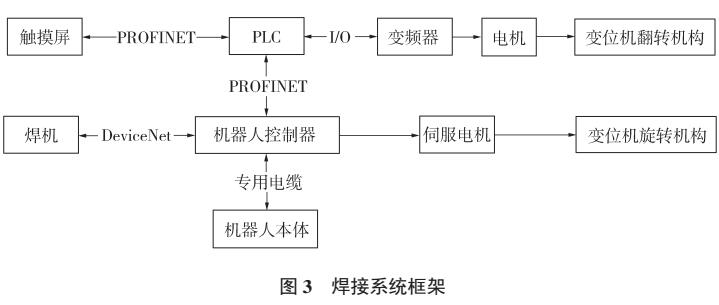
目前曲线结构的小型工件大多采用手工焊方式,对焊工技术要求高、人工劳动强度大,焊接质量难以保证。因此,引入焊接自动化设备十分必要,而焊接机器人和焊接专机是实现焊接自动化的两种重要方式。焊接专机是为一种或几种工件的焊接而设计的专用设备,对于曲线结构小型工件的焊接优势不明显;而焊接机器人是一种柔性的焊接设备,通过更改程序即可实现曲线结构小型工件的焊接。随着计算机技术、信息控制技术和人工智能技术的不断发展,越来越多的机器人应用于工业生产,既保证了焊接质量又降低了工人劳动强度和生产成本。对于复杂工件的焊接,受焊接机器人臂长和自由度的限制,焊枪难以到达某些焊缝,需加入焊接变位机拖动工件使相应焊缝处于理想的焊接位置,以方便机器人进行焊接操作。
针对曲线结构工件的人工焊接效率低、焊接质量不稳定、人工劳动强度大等问题,基于机器人设计出一种高效率和高精度的焊接系统。本系统采用机器人与PLC联合控制变位机的翻转和回转,使待焊工件的焊缝始终处于平焊或船形焊位置,利用触摸屏设置翻转速度和显示整个控制系统的工作状态,通过机器人与焊机的通讯及机器人在线示教编程,实现曲线结构工件的自动化焊接。为了保证焊接质量,采用接触传感和电弧传感功能精确寻位和实时修正示教轨迹。经实际应用表明,系统运行良好,达到了预期设计目标。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



