
资料下载


如何进行非完整的约束轮式移动机器人控制系统的设计
分享资料个
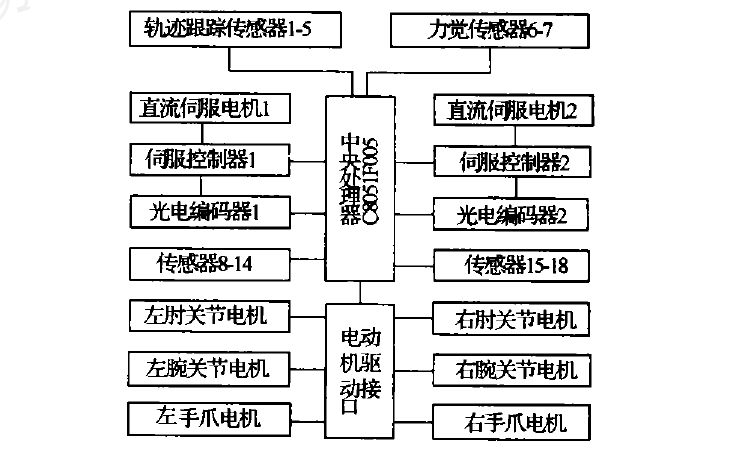
介绍了一例非完整约束轮式移动机器人机械结构及控制系统软硬件的设计。采用美国Cygnal公司新研制的C8051F005 单片机作为机器人控制系统的CPU 及瑞士MAXON 公司的直流伺服电机作为双轮驱动单元,利用非完整约束条件和非完整约束运动规划原理,研制了一例非完整约束轮式移动机器人,该机器人可跟踪任意直线、圆弧曲线轨迹等,也可实现原地零半径旋转及任意轨迹运动。运动自主灵活。对直线及圆弧轨迹进行了跟踪实验。
目前,移动机器人已广泛用于科学考察、地质勘探、灾难营救等多个领域,对人类了解地球、征服自然、探索宇宙具有重要意义。同时,也是代替人们在有辐射、有粉尘和有毒等环境中作业必不可少的工具。移动机器人的典型行走形式有轮式、履带式和腿足式等。
轮式移动机器人系统是典型的非完整约束机械系统。利用非完整约束条件和非完整运动规划的原理,研究开发新型的具有良好的目标轨迹跟踪和控制性能轮式移动机器人系统,在机器人领域下成为一个新的研究热点。轮式机器人其实与车辆极为相似,因此对于轮式移动机器人的研究以及无人驾驶车辆的发展都有重大的意义。通过研制一台轮式移动机器人AeroAcer ,对直线及圆弧等目标轨迹进行了跟踪试验。
根据需要,AeroAcer 轮式移动机器人结构包括:行走驱动部、躯干、手臂及手爪。行走驱动部结构如图1 所示,采用两轮独立驱动的结构,并使AeroAcer 的形心和质心对地平面的投影落于两个驱动轮轴线上。驱动轮分别由两套直流伺服系统驱动,提供需要的转速或者力矩;前后对称于驱动轮轴线各布置一万向轮,可任意移动而不会对AeroAcer 产生阻力和约束作用,这样,只要分别控制两个驱动轮的不同的速度或者力矩,就可以使AeroAcer 按照所要求的方向和速度移动,从而实现运动规划、稳定以及跟踪等控制任务。驱动轮轴线经过底盘的形心的投影,可实现零转弯半径,同时也使轨迹规划及控制相对简单。另外,驱动轮轴线过质心的投影,可大大地提高驱动电机的效率。内带减速齿轮的驱动电机固定在车架上,两个驱动车轮也分别通过轴架固定在车架上。电机的输出轴驱动车轮。连接在电机上的圆光栅在电机运转时产生相位上相差90 度的脉冲信号,通过对此脉冲信号进行检测和运算,就可得到AeroAcer 的位置、速度等状态量。选用了500 线的圆光栅,即电动机每旋转一周输出500 个脉冲,由于采用33 :1 的减速齿轮,因此车轮每转动一周圆光栅将输出33 ×500 = 16500 个脉冲,具有相当高的精度。选择圆光栅的目的在于:一方面将圆光栅产生的脉冲信号经过伺服放大器内的频压变换得到电机的速度用于速度反馈以形成速度闭环,同时还可以对脉冲信号经过计数、运算获得AeroAcer 的位置和速度,简化了系统设计,节省了成本。由于直流伺服电机具有启动力矩大,动态性能好,调速范围宽和控制较为简单等一系列优点[2 ] 。因此在AeroAcer 中选用瑞士MAXON 公司的直流伺服电机作为驱动单元,包括带有减速齿轮的直流电机、伺服放大器以及用作速度反馈和检测的圆光栅。电机可以工作在速度方式和力矩方式,可以运行在由速度和加速度决定的四个象限,从而可以在该装置上针对AeroAcer 的运动学和动力学模型进行实验研究。其中,伺服放大器根据电机的转速或电流调整输出到电机的电压,从而控制电机的转速、力矩等。系统所使用的是ADS50/ 5 伺服放大器。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




