
资料下载


×
双目视觉敏感器数据流设计
消耗积分:3 |
格式:rar |
大小:2.20 MB |
2018-01-25
分享资料个
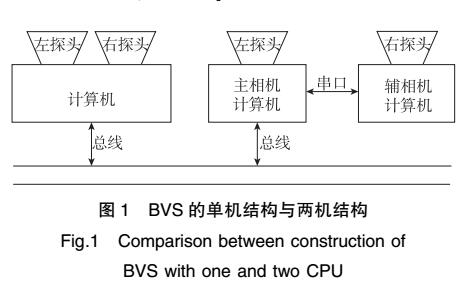
双目视觉导航敏感器BVS逐渐成为各国航天最新领域的研制热点。双目立体视觉是由不同位置的两台或者一台摄像机经过移动或旋转拍摄同一幅场景,通过各种算法匹配出相应像点,从而计算出视差,然后基于三角测量原理恢复深度(距离)信息。与单摄像机的情况相比较,利用双摄像机定位时,每个特征点都可以得到其唯一确定的位置坐标。由于线性方程存在解析解,故无需迭代运算。因此,立体视觉的模型要优于单摄像机的模型阳。
然而,BVS的硬件结构比单目成像的敏感器复杂,且单目成像类敏感器起步较早,已成熟应用于在轨拍摄、星敏感器定姿、交会对接。引等多项空间探索实验中,成为航天器的重要有效载荷。本文基于单目成像敏感器的成熟硬件,使用通信串口连接两个单目成像敏感器搭建BVS,即每个探头后各有一个计算机,共同实现双目视觉。
此种结构设计的优势在于其硬件结构简单,使用两台普通星敏感器或交会对接成像敏感器(CRDS)硬件即可搭建,无需重新设计、调试硬件单机,然而该设计对串口的数据流要求较高。本文通过左右相机之间数据流的合理设计,保证了左右相机配合进行双目图像处理,并实现了上位机或地面测试设备对BVS的遥控通信功能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




