
资料下载


×
基于双目视觉的盆腔微创手术增强现实导航仿真系统的设计
消耗积分:0 |
格式:rar |
大小:1.10 MB |
2018-12-29
分享资料个
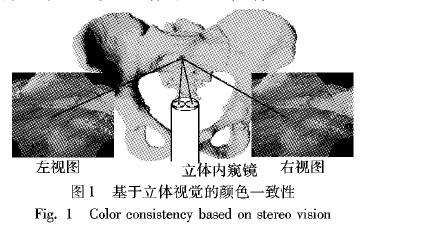
基于内窥镜视觉导航的盆腔微创手术,往往因为病灶的复杂解剖位置以及内窥镜视野的局限性,对手术的顺利开展提出了重要的挑战。针对这个问题,设计并开发一套基于立体视觉的盆腔微创手术的增强现实( AR)导航仿真系统。首先,利用术前的CT影像重建骨盆3D模型以及盆腔的真实手术视频,生成带有纹理信息的骨盆3D模型,仿真一套具有真实轨迹的手术视频;然后,利用基于可视点颜色一致性的2D/3D配准技术,实现术前重建模型与手术视野的初始化配准。利用立体视觉跟踪算法,对手术过程中的内窥镜位置进行跟踪,根据内窥镜多自由度的变换矩阵来实现术前3D模型与手术视野的融合与增强现实导航。估计轨迹与真实轨迹的均方根误差为2.3933 mm,仿真实验表明,导航系统为视觉导航提供良好的增强现实显示效果。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



