
资料下载


×
基于无线传感器的采摘机械手避障系统研究
消耗积分:3 |
格式:rar |
大小:0.35 MB |
2018-02-09
分享资料个
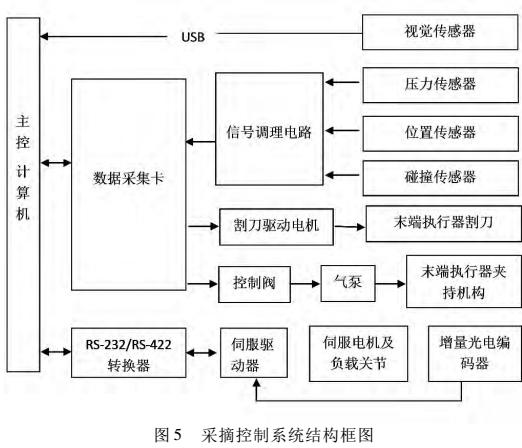
随着计算机控制技术、无线传感器技术及果蔬采摘设备的日益结合与发展更新,农业果蔬的采摘机器人机械手避障系统的研究更为深入具体,更适应实际场合果蔬采摘。为此,从无线传感器应用技术角度入手,针对机械手在采摘过程中会遇到枝叶、茎秆等相关障碍物,考虑其机械手移动位置、目标点及障碍物之间的不确定性,对避障控制系统的关键问题进行了分析,寻求适合机械手工作的避障控制算法,以提高采摘机械手的采摘精度和避障效果,为采摘机器人的进一步改进提供一定的技术支持。在末端执行器的关键部位安装有所需的各类重要传感器,通过采摘机器人视觉系统的传递信号,达到识别、控制并执行采摘的循环动作的目的。无线传感器在此过程中实时进行精准传输采集,控制机械手在作业过程中有效避开障碍物,实现高精度、智能化、自动化的采摘作业。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






