
资料下载


×
机器人砂带磨抛路径规划
消耗积分:1 |
格式:rar |
大小:0.98 MB |
2018-03-01
分享资料个
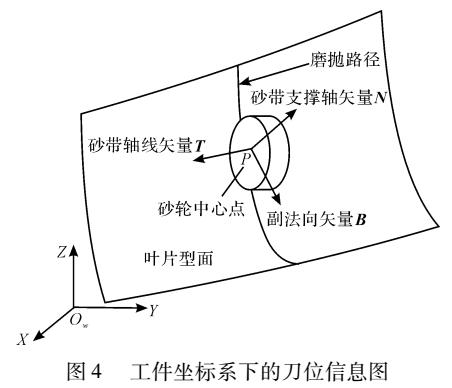
针对机器人砂带磨抛复杂曲面叶片问题,对叶片内外型面和进排气边的磨抛路径规划及后处理技术进行了研究,对复杂曲面叶片的机器人砂带磨抛路径规划的计算效率及加T‘效率进行了分析,提出了一种将基于等残留高度法的笛卡尔空间计算的磨抛行距转化为参数域空间的磨抛行距的方法,并将机器人砂带磨抛复杂曲面叶片接触轮的巾心坐标位置、支撑轴矢量以及轴线矢量数据后处理为机器人的位姿信息,利用机器人砂带磨抛系统装备实验平台对复杂曲面叶片进行了实际的加T实验。研究结果表明:所提出的刀路规划和后处理技术能够有效地解决机器人砂带磨抛复杂曲面叶片的问题,具有加工路径总长短以及路径条数少的特点,计算简单、加T效率高、加工表面质量好。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




