
资料下载


×
基于自抗扰控制器的电液力伺服加载系统
消耗积分:3 |
格式:rar |
大小:0.80 MB |
2018-03-05
分享资料个
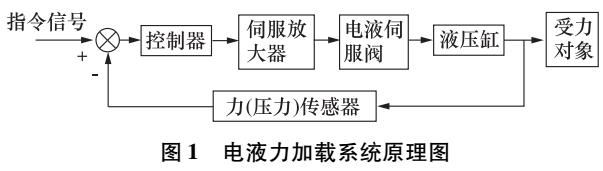
在航空关节轴承疲劳寿命及性能评价试验中,采用电液力伺服加载控制系统来模拟关节轴承在工作中所承受的真实运动和载荷。传统PID控制技术在工程实际中大量应用,但其具有对于复杂系统控制精度减低及对环境变化的适应能力不足的缺点,因此无法满足试验机在复杂条件下受力载荷的高性能受力要求。引入自抗扰控制器( ADRC),评估系统的状态信息和扰动信息,解决在极端条件、无扰动数学模型下对动态载荷谱加载的精确控制问题。通过仿真与实验证明:在外部条件相同的情况下,自抗扰控制器在电液力伺服加载系统中的控制效果优于PID控制,系统的响应速度、抗干扰能力以及鲁棒性显著提高。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






