
资料下载


×
液压驱动连续型机械臂原理与设计
消耗积分:2 |
格式:rar |
大小:2.55 MB |
2018-03-05
分享资料个
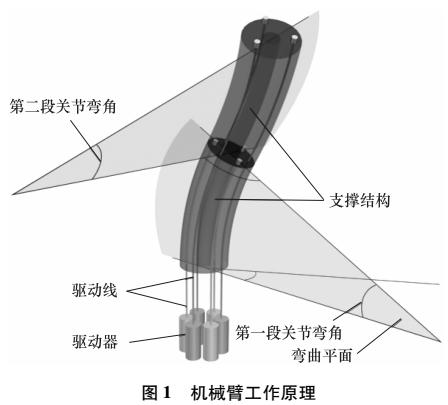
连续型机械臂是一种新型仿生机械臂,通过模拟象鼻或章鱼触手的运动方式来实现多自由度作业。从1999年提出连续型机械臂的概念以来,国内外研究团队已经提出了很多种设计方案与较为成熟的运动学模型。目前国内外对连续型机械臂的设计多采用电机或气动伺服肌肉来驱动,WALKER等研制了绳索驱动的机械臂。针对工业使用的大功率连续型机械臂研究较少,英国某公司研制出用于工业现场探查与检修用的柔性机械臂。
针对大功率连续型机械臂关节运动同步较难实现,提出采用液压缸连接钢丝绳,通过对液压缸进行闭环伺服控制来驱动大功率连续型机械臂。实验用的机械臂直径达140 mm,可在恶劣环境下工作并驱动大负载,在国内外对连续型机械臂研究中,研究设计的机械臂功率较大。
通过搭建试验台来验证设计和运动学模型,采用3个比例阀和位移传感器来对液压缸进行闭环控制。在控制系统方面,采用LabVIEW编程处理采集卡的数据,并根据机械臂的数学模型,产生相应的控制信号,对3个液压缸进行同步控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





