
资料下载


×
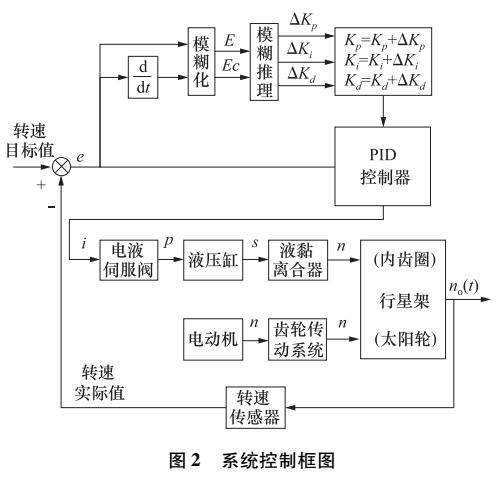
可控起动装置电液伺服系统控制策略研究
消耗积分:1 |
格式:rar |
大小:2.19 MB |
2018-03-28
分享资料个
高产高效综采工作面正向设备重型化、大型化的方向发展,其中大功率刮板输送机在采煤装备中占有重要地位。大功率刮板输送机通常在起动、制动时会出现满负荷或设计极限工况。可控起动装置( CST)具有可控软起动、实现主电机空载起动等优点,会对刮板输送机的链条、驱动电机起到保护作用,使设备平稳起动、可靠运行。电液伺服系统具有负载能力强、功率密度大、响应快、控制精度高等优点,广泛应用于CST控制系统。
为使电液伺服系统达到更好的控制效果,目前非线性理论、自适应控制技术在电液伺服控制方面得到了越来越广泛的应用,如:参数白适应控制算法、蚁群算法、遗传算法、模糊PID算法等。传统的PID控制通过设定具体参数来达到控制效果,参数整定的优势有一定局域性,全局控制效果不是很理想,特别是研究对象无精确数学模型。模糊PID算法对系统参数变化和外部干扰的鲁棒性强,不需要控制对象的精确数学模型,在克服系统非线性有很大优势。
针对以上优势,采用模糊PID算法,利用AMESim建立CST电液系统模型,应用MATLAB/Simulink设计模糊PID控制器,最终通过AMESim和Simulink的集成仿真环境S-Function财CST液压伺服系统进行联合仿真,从而可以对CST电液伺服系统实时控制,达到在线调控目的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






