
资料下载


×
仿生双眼的立体视控制系统
消耗积分:1 |
格式:rar |
大小:1.71 MB |
2018-04-09
分享资料个
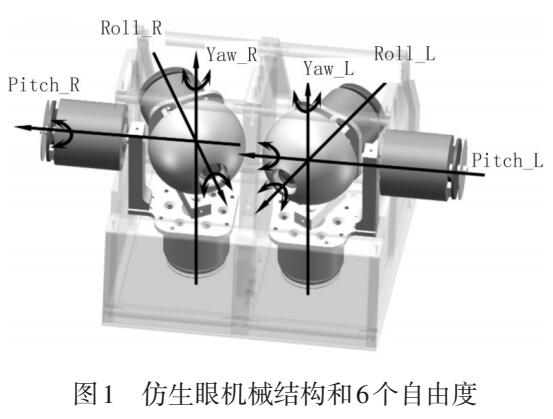
为了让机器人也能够拥有人类一样的眼睛,也为了让人们更好的借助机器人的眼睛克服在时间和空间上的限制,看到更多不一样的立体世界,基于人眼的结构特点和运动特性,设计了一个具有6个自由度的仿生眼平台。基于该仿生眼平台以及前人对人眼观看立体世界双眼工作机理的研究成果,提出了一种基于视觉反馈的仿生双眼的立体视控制方法。对左右眼摄像机采集的同步图像进行特征点提取、匹配以及一系列过滤筛选得到准确的特征点对,利用这些特征点对来分别计算左右眼各3个自由度的电机调节参数,最后反馈给电机控制器调节双眼相对位置来获取合适的3D图像信号输出。实验中眼球产生运动后,从图像信号进入到最后电机反馈调节结束耗时均在300 ms以内,实现了可动仿生双眼在运动中均可近乎实时的保证良好的3D视频信号输出。本文方法不仅能够使机器人眼在功能上更加接近人眼,也能够使人们通过机器人眼实现自身在视觉上的延伸。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





