
资料下载


×
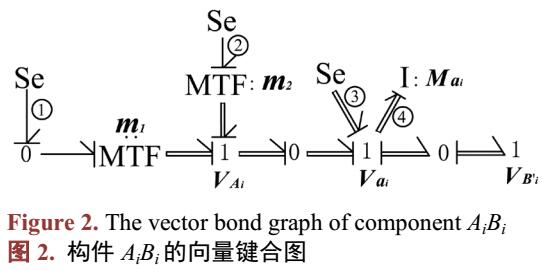
3-PPR型平面并联机构动力学分析
消耗积分:1 |
格式:rar |
大小:0.90 MB |
2018-04-20
分享资料个
并联机构具有结构稳定、刚度大、承载能力强、精度高、动力性能好等特点,在包装机械、精密制造及微创医疗等领域得到了广泛的应用。其中三自由度平面并联机构,既是研究空间并联机构的基础,又由于其结构简单、对称,制造成本低,便于控制等特点,日益受到人们的重视,在机器人应用领域颇具特色及应用前景。该类机构的动力学建模与分析,对于其驱动电机的选择及控制、动静态强度的计算与校核、机构动力学性能的改善与优化等都十分重要。尽管目前己相继提出具有有不同特点的动力学建模与分析方法,但这些方法及相应的软件多数仅局限于单一能域系统(例如,机械系统)的局部动力学。键合图方法在处理多种能量形式并存系统(例如,机、电、液、气并存系统)的全局动力学问题方面优势明显,在实际工程中得到了日益广泛的应用。但是,在处理复杂多体系统动力学建模与分析问题时,其标量键合图模型十分繁杂,实际应用非常不便。向量键合图法[正是在这一背景下提出的,除具备标量键合图法的特点及优势外,向量键合图每根键上所对应的势变量和流变量皆为向量形式,这使其包含信息量较大,可以用更加紧凑、简明的图形方式,表述平面井联机构的运动学及动力学特征。在该类机构的计算机辅助动力学分析中,力学概念清晰,应用更加便利。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





