
资料下载


×
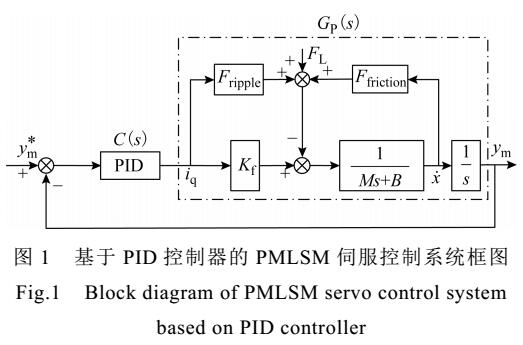
PMLSM自适应反推滑模控制
消耗积分:0 |
格式:rar |
大小:1.13 MB |
2018-04-24
分享资料个
针对系统存在的摩擦力、负载扰动、参数变化等不确定性因素以及瞬时超调量的问题,本文提出了自适应反推滑模控制( Adaptive Backstepping Sliding Mode Control,ABSMC)和多阶段速度规划( Multi-segment Velocity Planning,MVP)相结合的控制方法。自适应反推控制的基本思想是重复选择系统状态空间作为系统控制量的输入,反推过程会产生一个新的控制量输出,利用李雅普诺夫函数优化得出系统实际输入;利用多阶段梯形速度规划,设计每阶段的速度滑模函数,采用切换控制改变系统的控制模式,抑制机械抖动和瞬时超调量。最后系统实验结果表明,所提出的控制方案是可行有效的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




