
资料下载


如何改善开关磁阻电动机模糊控制系统的动、静态性能。
分享资料个
针对开关磁阻电动机非线性、难以建立精确数学模型的问题,本文对开关磁阻电动机的启动、运行、调速等方面进行了研究,利用粒子群优化算法对模糊控制器量化因子和输出比例因子参数进行优化。在MATLAB/Simulink下进行仿真,从而验证粒子群优化算法优化模糊控制器参数的有效性。仿真结果表明,该方法改善了开关磁阻电动机模糊控制系统的动、静态性能。
开关磁阻电动机(Switched Reluctance Motor,SRM)是一种新型的机电一体化交流调速系统,其定子极上绕有集中绕组,转子既无绕组亦无永磁体,结构简单、坚固。但是,由于SRM存在着严重的非线性问题,线性结构的PID调节器无法得到理想的控制性能。
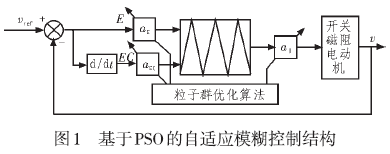
模糊控制器本质上是一种非线性控制器一一,具有较强的鲁棒性,对变化的对象参数有较强的适应性一。但是,模糊控制的动、静态性能之间存在着一定的矛盾一,采用传统试凑法难以快速获得控制性能良好的量化凶子。和输出比例凶子a。凶此,找到合适的算法快速获得有效的模糊控制器参数显得尤为重要。
文中首先设计了SRM模糊控制器,然后,介绍了粒子群优化(ParticleSwarm Optimization,PSO)算法,利用该算法寻找模糊控制器参数的最优解。最后,在MATLAB/Simulink中建立了SRM仿真模型,仿真结果验证了经PSO算法优化参数后的模糊控制器较传统模糊控制器能使SRM获得更好的动、静态性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



