
资料下载


×
如何通过电感数字转换器LCD1000作为循迹传感器进行循迹小车设计概述
消耗积分:0 |
格式:pdf |
大小:0.06 MB |
2018-07-20
SunEidde
分享资料个
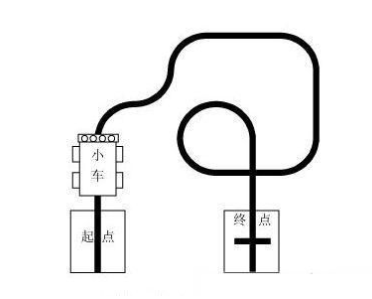
本设计介绍的寻迹小车以 MK60N512VMD100 微控制器为核心控制单元,以一片 TI 公司 LDC1000 电感数字转换器作为循迹传感器,可以循着 0.8~1.0mm 铁丝前进,能检测赛道上随机放置的金属物体并发出声音提示;通过光电编码器检测模型车的实时速度,可以记录实时速度、路程并显示到 OLED 液晶显示屏上;使用 PID 控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
本系统通过LCD1000 采集赛道信息并转化成数字信号传输给单片机,单片机根据预先写好的算法处理输入数据,输出不同占空比控制舵机转向和电机转速, 编码器记录电机转速反馈给 CPU 形成闭环系统,系统工作原理图如图 1 所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






