
资料下载


使用以双灰度传感器实现的曲线循迹以及矩形循迹的资料说明
2018217274
分享资料个
一、简介
在这次课程中,我们小组选定的课题是循迹小车,在长达数周的辛苦付出中,我组小车已能实现的功能有1.红遥控小车2.以灰度传感器实现矩形循迹3.以灰度传感器实现曲线循迹。虽然功能比较少但其中涉及到的知识丰富包括电动机的焊接、红外遥控模块调试、以L298N实现的电机调速及正反转、灰度传感器的调试、循迹方案及arduino代码设计。在圆满完成循迹任务的同时我组收获颇多,受益匪浅。
二、具体实现步骤
2.1材料的选购
关于材料选购,由于我自己有非常多的arduino配件,加上我室友提供的一些模块,我组在材料选购方面秉持着尽可能节省经费的理念:“能省则省,能借不买”。主要是一开始对自己组的实力没有把握,我不希望出现花了学校很多经费最后却什么都没做出来的情况,我认为这是极为可耻的。另外我组有一个目标就是用最少的经费实现最多最好的功能,因而我选择了一个比较简单易上手的项目。
在材料上,我组除了老师统一购买的9V锂电池外仅购买了66元的车身框架(包含电机)和两个灰度传感器的我组其他材料全部由自己提供,包括升压模块、红外传感模块。因而在经费开销上我组是实打实的抠门,但我们同时又为自己能在经经费最小化的情况完成与其他组同样的任务而自豪,这也算的上我们组的一大优势。
2.2车身主体框架的搭建
由于我组所选项目是循迹小车,因而在机械结构上仅涉及到车身主体的搭建。我觉得这个搭建过程是比较简单轻松的一个过程,就是单纯的车身与车轮的连接。我将其分配给了我的两位组员,在第一次项目开始的那节课我们就已经将车身主体整个搭建完成。这个过程为我们循迹的实现提供了一个载体。
2.3小车的转弯前进后退等基本动作的实现
关于这部分内容我觉得对于像我们一样初次接触直流电机的同学们算是一个难点。为此我在这个问题上花费了很长时间研究觉得有以下两个方案可实现。
方案一:通过arduino自带的pwn口以analogwrite(《数值0-255》)来实现小车两车轮速度的调节,但令人极其失望的是arduino在板载供电只有5V的情况输出到pwm口只有大概3.8V的电压,电压低的连车轮都转不起来哦。另一个问题是要实现大幅度转向,车轮必须实现正反转,使用自带的pwm口只能调速不能换向,针对这两个问题,我查阅资料觉得方案二可行。
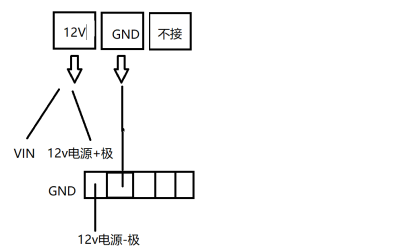
方案二:使用L298N升压模块来为直流电机升压、调速、换向。其实我最开始非常不情愿去使用L298N,因为这涉及到一个对我来说完全陌生的领域,我完全不清楚自己到底能不能做好。最后迫于无奈,我还是从同学那借来L298N,自己根据百度上良莠不齐的资料,学习L298N的接线及代码,为此我自己最后总结出了其接线方式(如上图),此外升压模块还有一个细节就是左右两侧的使能口(红色圈)不是拿来接线的,使用时只需将两个跳帽盖上,相当于对L298提供5V电压,若把去跳帽则取消5V电压,模块不工作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





