ROS与移动底盘通信教程
基于ROS的机器人建图与导航仿真全过程
ROS Navigation Stack的整体设计思路和功能包
将不确定性感知和姿态回归结合用于自动驾驶车辆定位
使用DJI M100+ROS的行人追随项目
闲聊一下SOA在落地路上的二三事
ROS完成ROS和ROS2中各个组件向openEuler的适配
智能纳米药物用于动态磁共振成像
基于ROS 2的安全认证软件框架
大神分享 X3派+大疆无人机-SLAM单目建图.ROS包制作

Realsense+大象机器人手眼标定方案详解
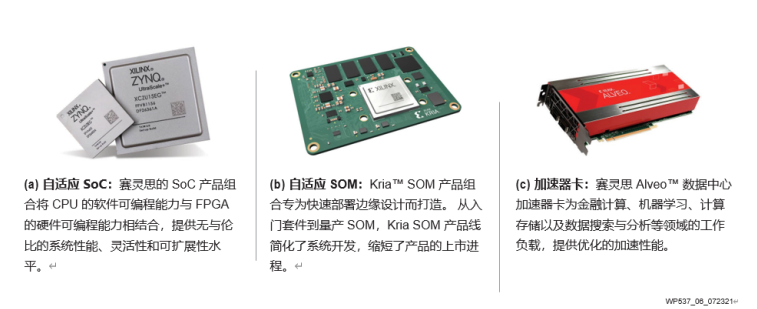
【自适应计算在机器人领域的应用】连载六:自适应计算平台实现ROS之路
ROS中导航功能包里路径规划A*算法中步骤和代码详解
如何在ROS的基础上提升无人驾驶系统的可靠性
浅谈机器人操作系统的演进升级
RT-Thread如何使用串口或者无线和ROS连接
ROS程序是如何控制伺服机的 所有答案尽在本文
基于ROS构建无人驾驶汽车的经验
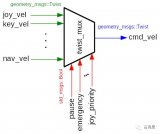
ROS开发技术的twist_mux功能包的原理和使用方法,灵活使用锁配置

 下载APP
下载APP
 搜索内容
搜索内容
