ROS机器人操作系统的实现原理(下)
ROS机器人操作系统的实现原理(上)
ROS操作系统学习笔记4
ROS操作系统学习笔记3

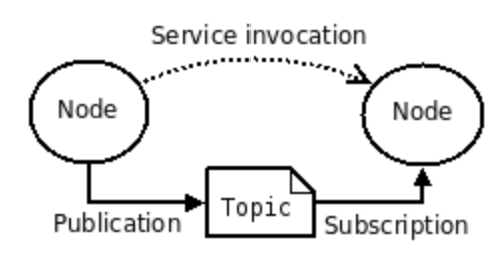
ROS1的通信架构的基础通信方式及相关概念
ROS操作系统学习笔记2
ROS操作系统学习笔记1
ROS系统的本地搭建(上)
ROS系统的本地搭建(下)
ROS学习笔记之ROS基本概念

ROS基本介绍
使用ROS 2 MoveIt和NVIDIA Isaac Sim创建逼真的机器人模拟
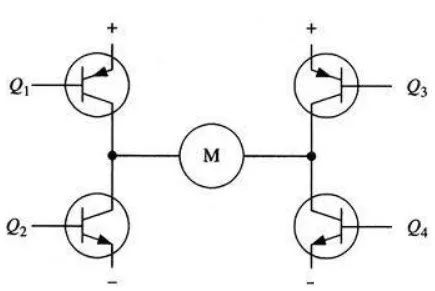
在ROS学习平台中常常使用到的直流电机控制原理与驱动电路
使用VScode搭建ROS开发环境
用于ROS移动机器人高集成电源解决方案(二)
用于ROS移动机器人高集成电源解决方案(一)
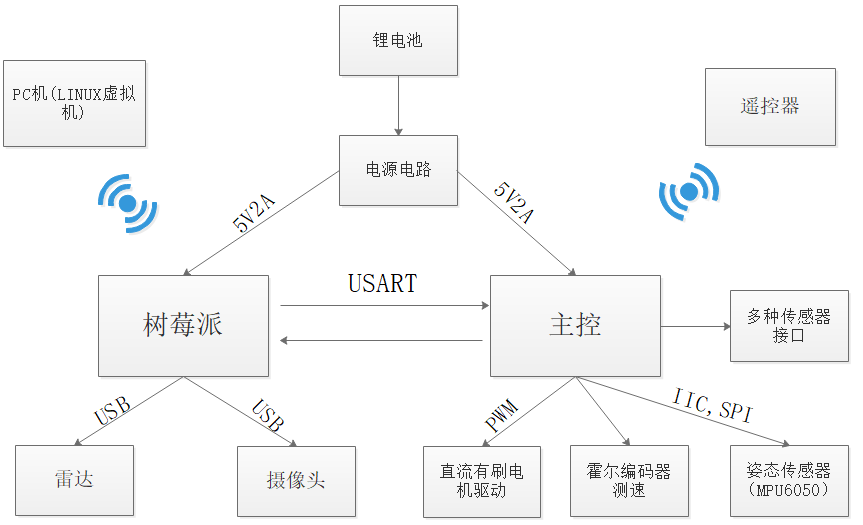
ROS移动机器人的通信接口电路设计
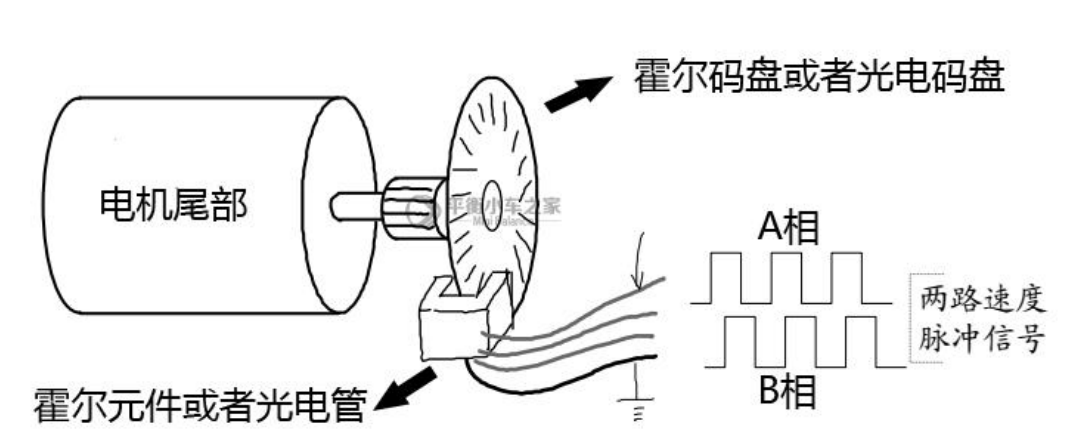
ROS移动机器人中常用的编码器

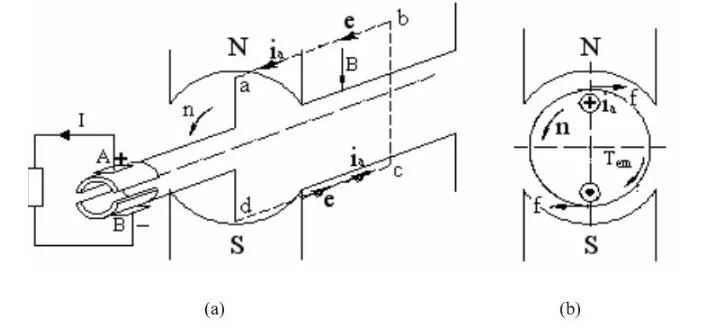
ROS机器人中直流电机控制原理与驱动电路设计
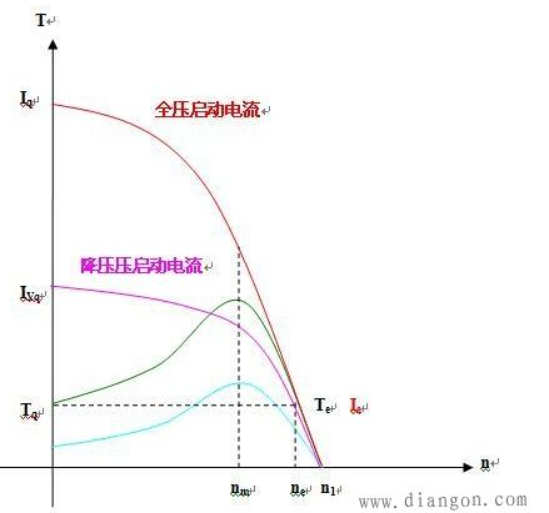
ROS移动机器人中常用的两种电机

 下载APP
下载APP
 搜索内容
搜索内容
