
资料下载


×
如何实现温室内移动机器人自主行走的温室道路边缘检测与导航算法
消耗积分:0 |
格式:rar |
大小:1.10 MB |
2020-08-03
分享资料个
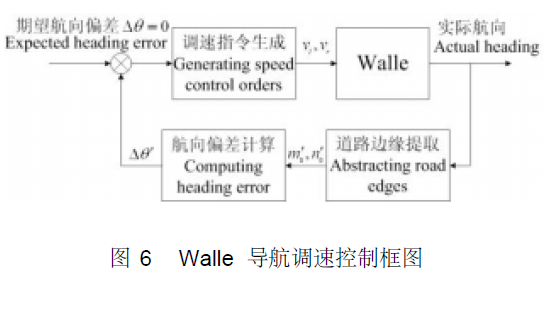
针对温室内移动机器人的应用需求,该文提出了一种应用于温室内移动机器人自主行走的温室道路边缘检测与导航算法。 此方法利用激光测距仪获取当前视场内路面、作物及障碍物信息,根据温室路面平整度高于作物冠层外表面的特点, 检测道路边缘并生成移动机器人下一采样控制周期的期望航向, 然后根据机器人几何与物理模型推算左右驱动轮速度调整指令,使移动机器人保持沿道路行走而不进入作物区中。该算法的有效性在温室移动机器人Walle 平台上得到了验证,机器人偏离道路中心线的平均值为-1.2707cm ,均方误差为2.6772 。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





