
资料下载


STEGObot剑龙机器人开源分享
听风说梦
分享资料个
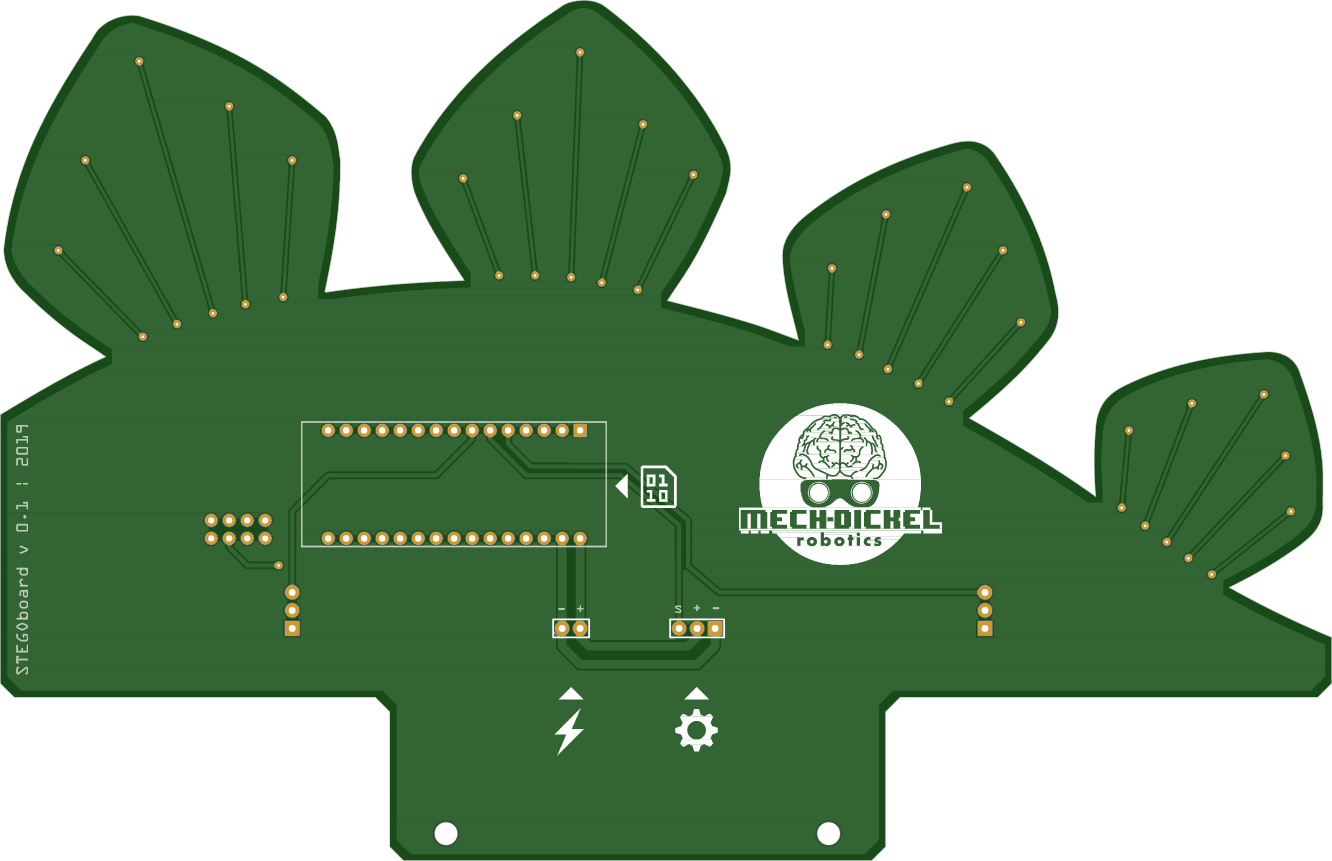
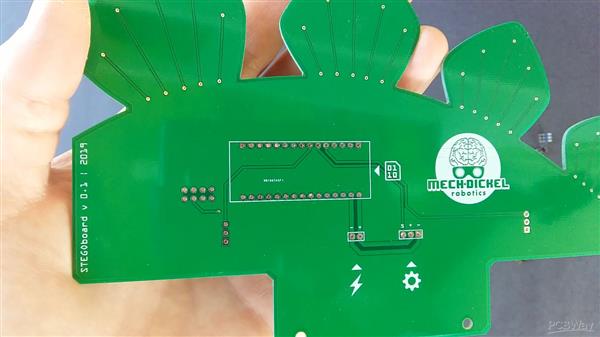
PCB图如下: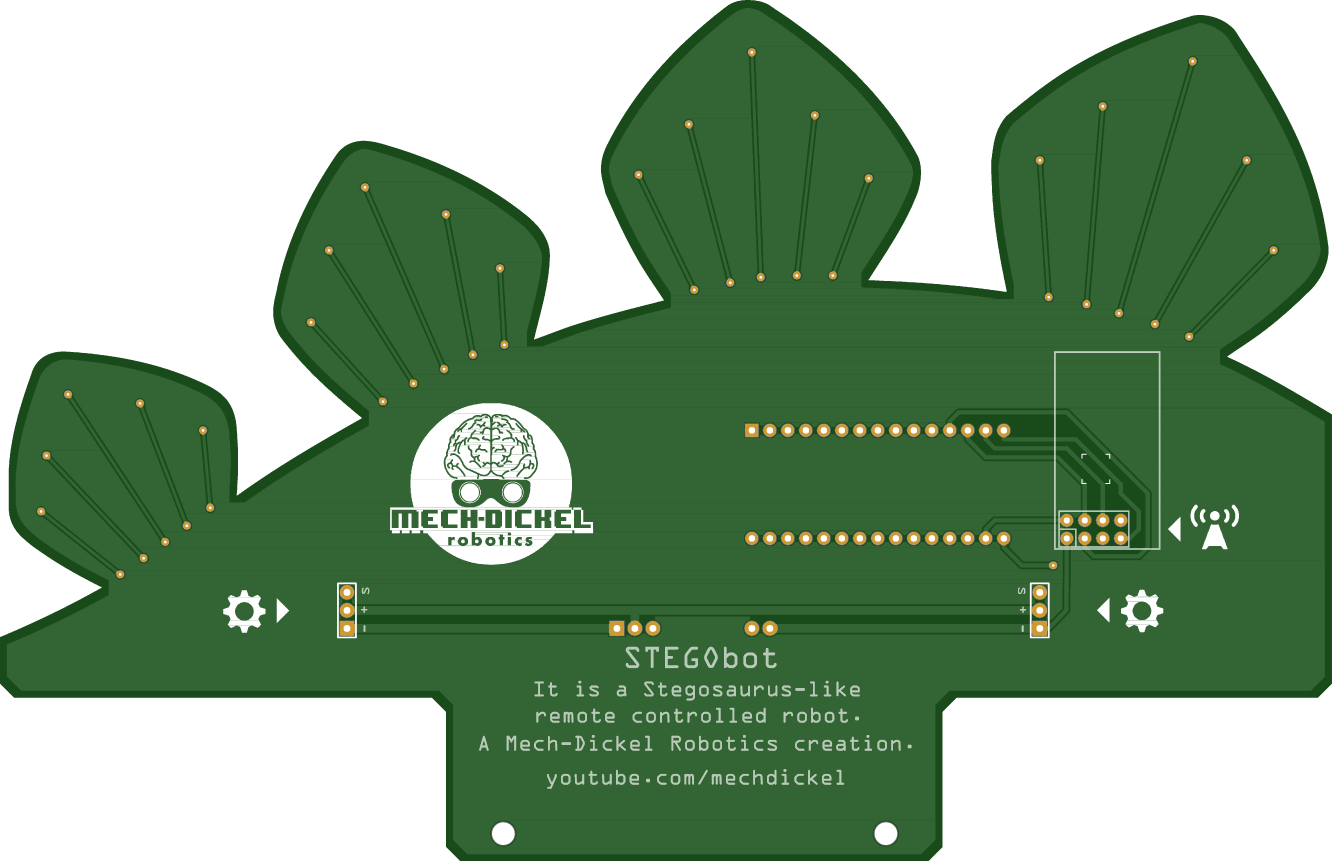
成分
| Arduino Nano R3 | × 1 |
| NRF24L01模块 | × 1 |
| 直角排针(3针) | × 3 |
| 直角排针(2 针) | × 1 |
| 母头插座(15针) | × 2 |
| 母头插座(4针) | × 2 |
| 锂聚合物电池(3.7V 2000 mAh) | × 2 |
| 无铅焊锡丝 | × 1 |
| 高抗冲聚苯乙烯(2mm 厚片材) | × 1 |
| 瞬干胶 | × 1 |
| 灰色喷涂底漆 | × 1 |
| 绿色喷漆 | × 1 |
| 海泰克HS-5245MG伺服电机 | × 1 |
| 海泰克HS-225MG伺服电机 | × 2 |
| M3 尼龙支架 (35mm) | × 4 |
| 螺栓 | × 37 |
| 坚果 | × 35 |
| LM2596 降压稳压器 | × 1 |
描述
STEGObot:剑龙机器人
介绍
这个小伙伴的概念有创造更多好玩的机器人的意志,让我4岁的男孩对学习电子学和机器人学更有兴趣。
它的主要特点是剑龙形状的PCB,它除了是支撑所有电子产品的主要部分外,也是美学的基本组成部分。
我打算展示这个机器人的整个设计和构造,以便更清楚地了解上下文。
下面的视频显示了概念和设计、机械、电子和编程的概述,但我还将在此处描述这些步骤以及一些额外的信息和细节。
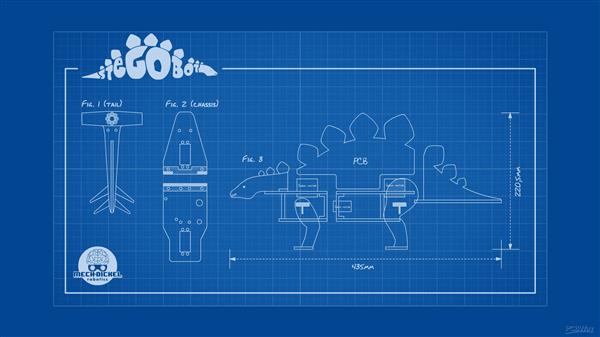
设计
我坐在办公桌前,手里拿着我孩子的剑龙玩具以获得灵感,开始直接在纸板上画出零件。
我最终得到了一个漂亮的纸板原型来测试腿/行走机构,并很好地了解零件的实际尺寸和排列。
然后,知道了所需的尺寸,我开始为机械零件绘制最终模型和 2D 模板。

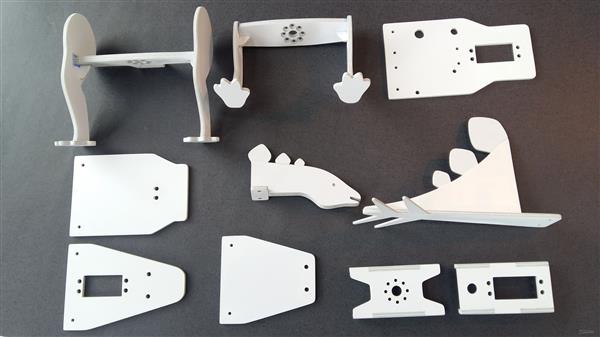
力学
所有机械部件均由高抗冲聚苯乙烯片(2 毫米厚的片材)制成。这是我最喜欢为我的机器人制作定制零件的材料,我已经使用这种材料大约 8 年了。
方法很简单:用胶水将模板粘在塑料片上。当胶水完全干燥时,我用美工刀将碎片切成线条。对于直线,我还使用金属尺来引导切割,以便它们具有真正的直线切割。
有些部分需要进一步加强。在这种情况下,我将多层组合以达到所需的强度,并使用即时粘合剂将所有东西连接起来。
为了使零件光滑,首先我先用 #60 砂纸打磨它们以去除多余的材料,然后用 #500 砂纸进行精细打磨。
这些孔很容易用钻头打孔。
最后一步是绘制所有内容。首先使用喷涂底漆,看看一切是否足够光滑,最后是所需的颜色。
腿/行走机构的伺服电机都是Hitec mini伺服。中间一个是 HS-5245MG,另外两个(用于前后腿)是 HS-225MG。我选择它们不是出于任何特殊原因……只是因为它们是我家里的那些。但它们是带有金属齿轮的优秀伺服电机,并且具有比必要更大的扭矩。
电子产品
PCB(我称之为 STEGOboard)旨在让伺服电机和 NRF24L01 模块轻松连接到 Arduino Nano 板。当然,这可以用一个非常小的 PCB 来完成。但是,正如我之前所说,PCB 也是美学的基本组成部分。
当我在脑海中想象整个机器人时,我想到它的背面应该有一个大的绿色 PCB,上面有独特的风筝形板。
PCB 形状文件(SVG)是用 Inkscape 制作的,电路板上电子部件的原理图和排列是用 Fritzing 制作的。Fritzing 还用于导出制造所需的 Gerber 文件。
PCB 具有三个用于伺服电机的连接器和用于 Arduino Nano 板和 NRF24L01 模块的接头。它还有一个电源连接器。一切都用无铅焊料焊接。
电源是由两节锂电池串联而成的,所以我有7.4V。但伺服电机接受的最大电压为 6 伏。因此,它还具有一个降压LM2596模块,以提供正确的电压并且不会烧毁伺服电机。
编程
STEGObot的编程非常简单,因为它只有三个伺服电机,并且是用Arduino IDE制作的。
基本上,我们必须移动中间的伺服电机来倾斜身体的前部并旋转前腿的伺服(同时,后腿以相反的方式旋转)。因此,它将机器人向前拉。
正玩得开心
STEGObot 可以前进、后退和左右转弯。它是由我制作的用于控制所有机器人的自定义遥控器远程控制的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




