
资料下载


如何在Raspberry Pi Pico中使用OLED显示器
陈勇
分享资料个
描述
SSD1306 Oled display with Raspberry pi pico - 在大多数项目中,我们需要显示单元来打印文本和传感器值。如今,最常用的显示器之一是Oled显示器。
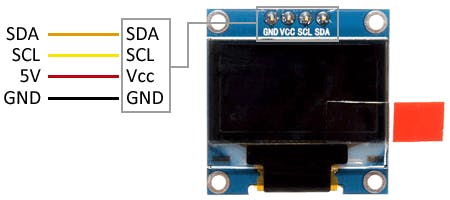
您可以在屏幕上看到的是 SSD1306 I2C 支持的 Oled 显示模块,我将与 Raspberry Pi Pico 一起使用。
谢谢 NextPCB:
本项目的顺利完成,得益于 NextPCB的帮助和支持。伙计们,如果您有 PCB 项目,请访问他们的网站并获得令人兴奋的折扣和优惠券。
5-10pcs PCB Prototypes仅需0美元:Nextpcb.com/pcbprototype
注册并从 NextPCB 获得 100 美元:Nextpcb.com/coupon
为什么选择 NextPCB
最高效、经济、创新的 PCB 解决方案
更高的质量
更低的花费
更快的交货
Raspberry Pi Pico 入门 – 引脚排列、规格 – 初学者指南
所需硬件
4pins 0.96" 128×64 OLED显示模组
树莓派 Pico
面包板
连接电线
OLED显示屏
diyprojectslab.com
0.96" 128x64 OLED 显示模块是一款紧凑、低成本的显示模块,非常适合任何需要小显示屏的项目。
该模块非常易于使用,只需四个引脚即可与微控制器连接。显示屏清晰明亮,模块极薄,非常适合在便携式应用中使用。
OLED显示功能
OLED(有机发光二极管)显示器是一种低功耗输出设备,能够通过控制每个像素来显示文本和图像。
最常见的尺寸是 128×64 像素(0.96 英寸),但 128×32 像素(0.91 英寸)也可从电子商店购买。
他们的屏幕通常是单色或双色。单色型号由蓝色或白色像素组成,而双色型号通常具有上部黄色和下部蓝色。
在本教程中,我将使用双色模型,但这也使用单色模型。
电路图 - 带树莓派 Pico 的 SSD1306 OLED 显示屏
diyprojectslab.com
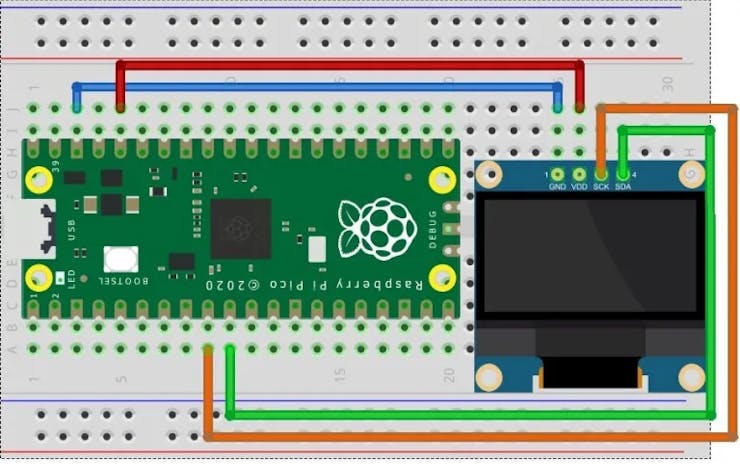
您可以指导树莓派 Pico 和 OLED 显示模块的电路连接,如下图所示。
OLED 显示模块的 SDA 引脚连接到 GPIO16(Pin21)
SCL 引脚连接到 GPIO17(Pin22)。
Vcc 引脚连接到 Pico Board 的 3.3v 引脚,即 Pin36。
显示模块的接地引脚连接到 Pico 板的接地引脚,即 Pin38
安装 SSD1306.py 库
我更喜欢 Thonny IDE 进行编程。这里的编程主要分为两个部分:1. SSD1306.py2。主文件
MicroPython SSD1306 I2C 库
这是因为 OLED 显示器首先需要SSD1306 驱动程序代码。我们必须先编写 SSD1306 驱动程序的代码。上传 SSD1306 代码后,我们就可以运行 main.py 代码了。
ssd1306.py
# MicroPython SSD1306 OLED driver, I2C and SPI interfaces
from micropython import const
import framebuf
# register definitions
SET_CONTRAST = const(0x81)
SET_ENTIRE_ON = const(0xA4)
SET_NORM_INV = const(0xA6)
SET_DISP = const(0xAE)
SET_MEM_ADDR = const(0x20)
SET_COL_ADDR = const(0x21)
SET_PAGE_ADDR = const(0x22)
SET_DISP_START_LINE = const(0x40)
SET_SEG_REMAP = const(0xA0)
SET_MUX_RATIO = const(0xA8)
SET_COM_OUT_DIR = const(0xC0)
SET_DISP_OFFSET = const(0xD3)
SET_COM_PIN_CFG = const(0xDA)
SET_DISP_CLK_DIV = const(0xD5)
SET_PRECHARGE = const(0xD9)
SET_VCOM_DESEL = const(0xDB)
SET_CHARGE_PUMP = const(0x8D)
# Subclassing FrameBuffer provides support for graphics primitives
# http://docs.micropython.org/en/latest/pyboard/library/framebuf.html
class SSD1306(framebuf.FrameBuffer):
def __init__(self, width, height, external_vcc):
self.width = width
self.height = height
self.external_vcc = external_vcc
self.pages = self.height // 8
self.buffer = bytearray(self.pages * self.width)
super().__init__(self.buffer, self.width, self.height, framebuf.MONO_VLSB)
self.init_display()
def init_display(self):
for cmd in (
SET_DISP | 0x00, # off
# address setting
SET_MEM_ADDR,
0x00, # horizontal
# resolution and layout
SET_DISP_START_LINE | 0x00,
SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0
SET_MUX_RATIO,
self.height - 1,
SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0
SET_DISP_OFFSET,
0x00,
SET_COM_PIN_CFG,
0x02 if self.width > 2 * self.height else 0x12,
# timing and driving scheme
SET_DISP_CLK_DIV,
0x80,
SET_PRECHARGE,
0x22 if self.external_vcc else 0xF1,
SET_VCOM_DESEL,
0x30, # 0.83*Vcc
# display
SET_CONTRAST,
0xFF, # maximum
SET_ENTIRE_ON, # output follows RAM contents
SET_NORM_INV, # not inverted
# charge pump
SET_CHARGE_PUMP,
0x10 if self.external_vcc else 0x14,
SET_DISP | 0x01,
): # on
self.write_cmd(cmd)
self.fill(0)
self.show()
def poweroff(self):
self.write_cmd(SET_DISP | 0x00)
def poweron(self):
self.write_cmd(SET_DISP | 0x01)
def contrast(self, contrast):
self.write_cmd(SET_CONTRAST)
self.write_cmd(contrast)
def invert(self, invert):
self.write_cmd(SET_NORM_INV | (invert & 1))
def show(self):
x0 = 0
x1 = self.width - 1
if self.width == 64:
# displays with width of 64 pixels are shifted by 32
x0 += 32
x1 += 32
self.write_cmd(SET_COL_ADDR)
self.write_cmd(x0)
self.write_cmd(x1)
self.write_cmd(SET_PAGE_ADDR)
self.write_cmd(0)
self.write_cmd(self.pages - 1)
self.write_data(self.buffer)
class SSD1306_I2C(SSD1306):
def __init__(self, width, height, i2c, addr=0x3C, external_vcc=False):
self.i2c = i2c
self.addr = addr
self.temp = bytearray(2)
self.write_list = [b"\x40", None] # Co=0, D/C#=1
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.temp[0] = 0x80 # Co=1, D/C#=0
self.temp[1] = cmd
self.i2c.writeto(self.addr, self.temp)
def write_data(self, buf):
self.write_list[1] = buf
self.i2c.writevto(self.addr, self.write_list)
class SSD1306_SPI(SSD1306):
def __init__(self, width, height, spi, dc, res, cs, external_vcc=False):
self.rate = 10 * 1024 * 1024
dc.init(dc.OUT, value=0)
res.init(res.OUT, value=0)
cs.init(cs.OUT, value=1)
self.spi = spi
self.dc = dc
self.res = res
self.cs = cs
import time
self.res(1)
time.sleep_ms(1)
self.res(0)
time.sleep_ms(10)
self.res(1)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs(1)
self.dc(0)
self.cs(0)
self.spi.write(bytearray([cmd]))
self.cs(1)
def write_data(self, buf):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs(1)
self.dc(1)
self.cs(0)
self.spi.write(buf)
self.cs(1)
现在点击下载和运行按钮。因此,您将能够看到保存在 Raspberry Pi Pico 中的 SSD1306 驱动程序。
主文件
在ThonnyIDE中再次打开一个新选项卡。复制以下代码并将其粘贴到Thonny IDE 窗口。以名称main.py保存文件。
from machine import Pin, I2C
from ssd1306 import SSD1306_I2C
WIDTH =128
HEIGHT= 64
i2c=I2C(0,scl=Pin(1),sda=Pin(0),freq=200000)
oled = SSD1306_I2C(WIDTH,HEIGHT,i2c)
while True:
oled.fill(0)
oled.text("DIY PROJECTS LAB", 0, 0)
oled.text("Tutorial", 0, 40)
oled.show()
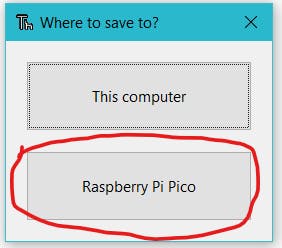
您需要选择 Raspberry Pi Pico ,然后将文件命名为“ssd1306.py” ,然后单击保存。然后对“ main.py ”文件执行相同的过程。此方法 允许您在 Pico 通电时运行程序。
托尼 IDE
OLED 显示屏 Raspberry Pi Pico 的工作演示
您可以参考以下视频将 OLED 与 Raspberry Pi Pico 板连接。
我希望你已经成功地完成了这项工作并享受了结果。现在,您为自己的项目有了一个经过测试的起点。
欢迎提问和评论
阅读类似文章:
Raspberry Pi Pico 入门 – 引脚排列、规格 – 初学者指南
HC-SR04 超声波测距传感器与树莓派 Pico 教程
将 PIR 运动传感器与 Raspberry Pi Pico 连接
树莓派 Pico 家庭自动化系统
带 Raspberry Pi Pico 的接口伺服电机
接口 0.96 英寸 OLED 显示屏,带 Raspberry Pi Pico
使用 Dht11 传感器的 Raspberry Pi Pico 气象站
接口 16*2 LCD 显示屏,带树莓派 Pico
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





