
资料下载


×
自动驾驶仪开源分享
消耗积分:2 |
格式:zip |
大小:3.96 MB |
2022-10-21
分享资料个
描述
新的自动驾驶仪:
你好!从第一个版本的经验来看,这里是第二个。电路更加坚固耐用(Uno 晶圆风格是一场噩梦……),我添加了一个用于电流吸收计算的 ADC 控制器,有两个用于 5V 的独立稳压器:一个用于电路,一个更大的用于步进电机。我介绍了 PID 算法(渐进式、积分式、微分式),因此我们可以修改自动驾驶仪的行为、响应能力、平滑或激进。设置菜单更加丰富,可以个性化自动驾驶仪。
我建议在这个链接上阅读我为第一个版本写的内容,然后回到这里享受新版本。我为您准备了完整的原理图,一些软件流程图和电路框图。为了将顶部和底部 PCB 层连接起来,我使用了大约 50 个铜穿过铆钉进行焊接。
要完成自动驾驶仪盒,您可以添加电池 Li.Po。我为这个项目制作的充电器电路,它非常适合。请通过此链接访问充电器项目以获取所有说明和详细信息。
要在看门狗 MCU 中使用看门狗功能,您必须更新其引导加载程序,因为原来的引导程序有错误。可能是您的 Arduino Nano 已经更新,也可能不是。
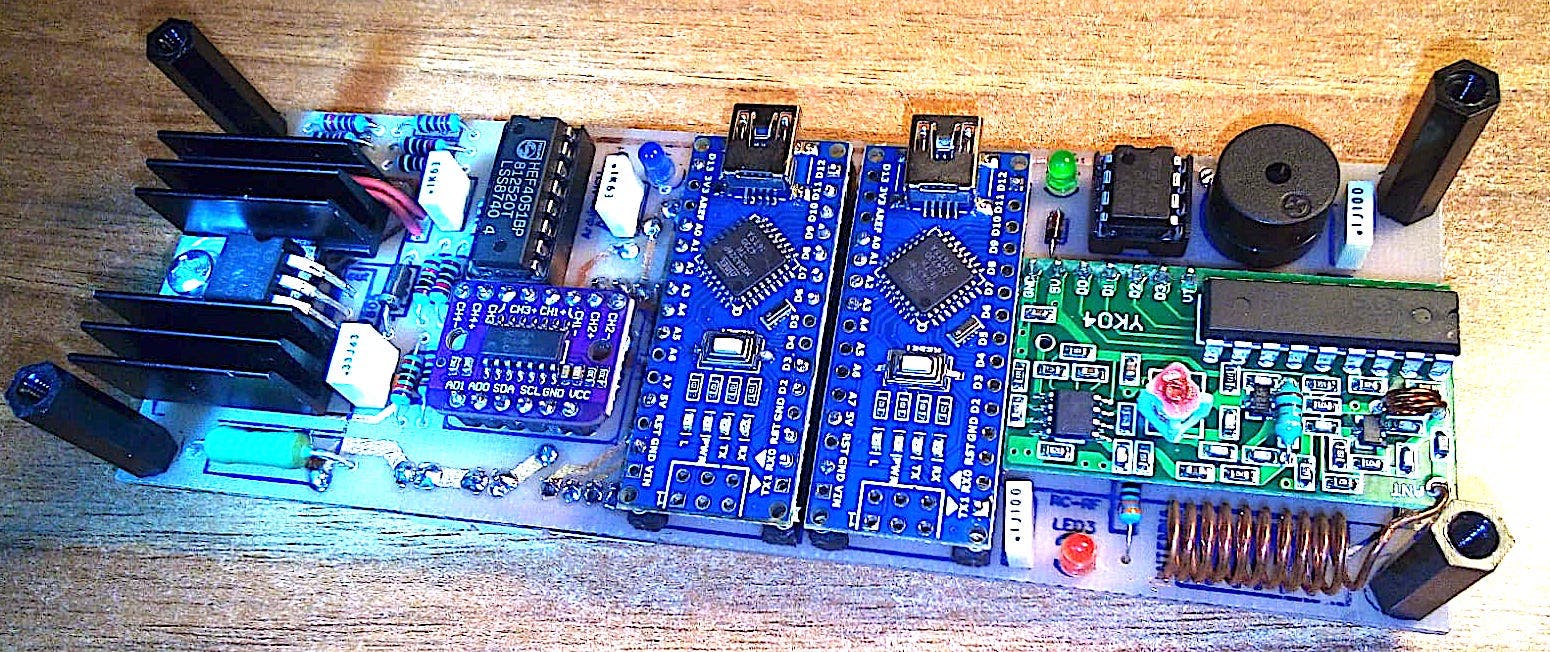
自动驾驶版2的图片
元件清单,电路概览:
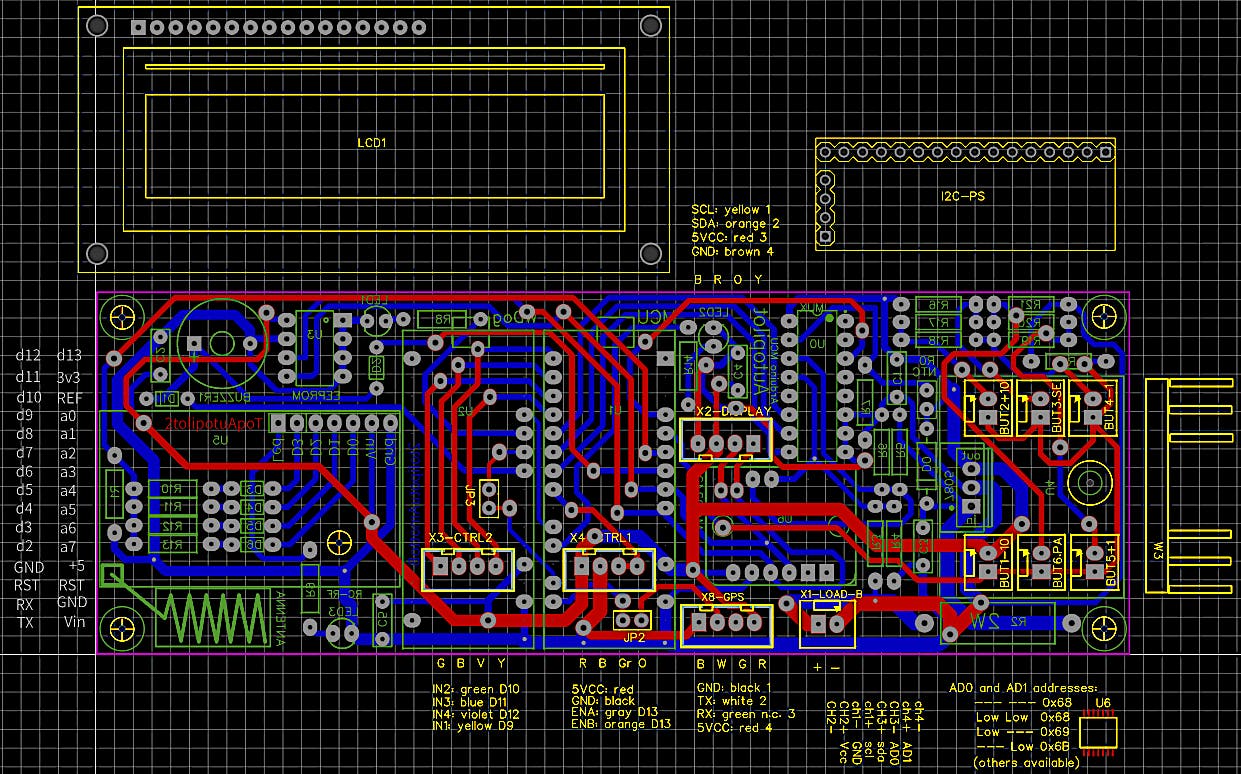
Autopilot2 PCB 电路概览
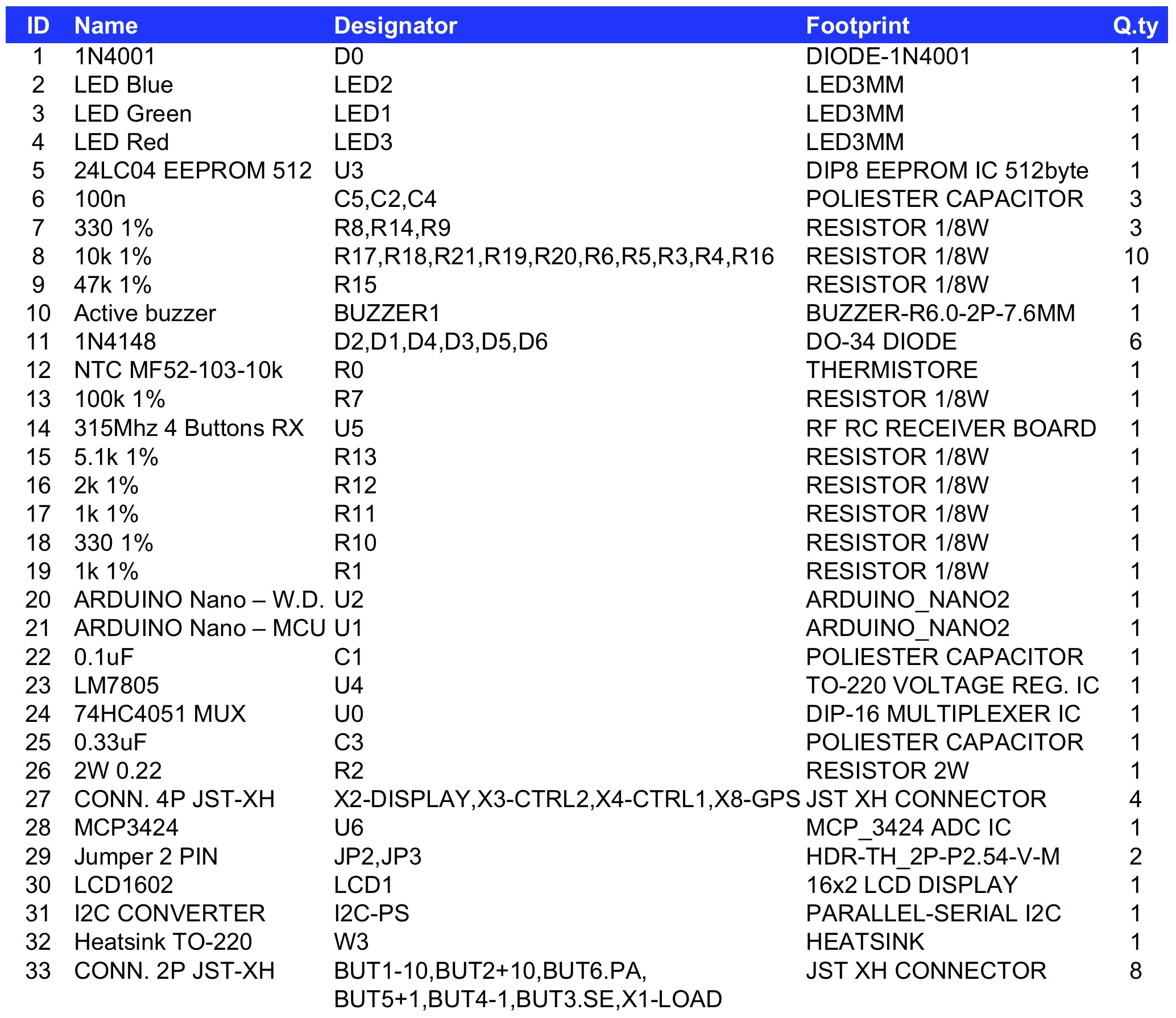
Autopilot2 组件列表
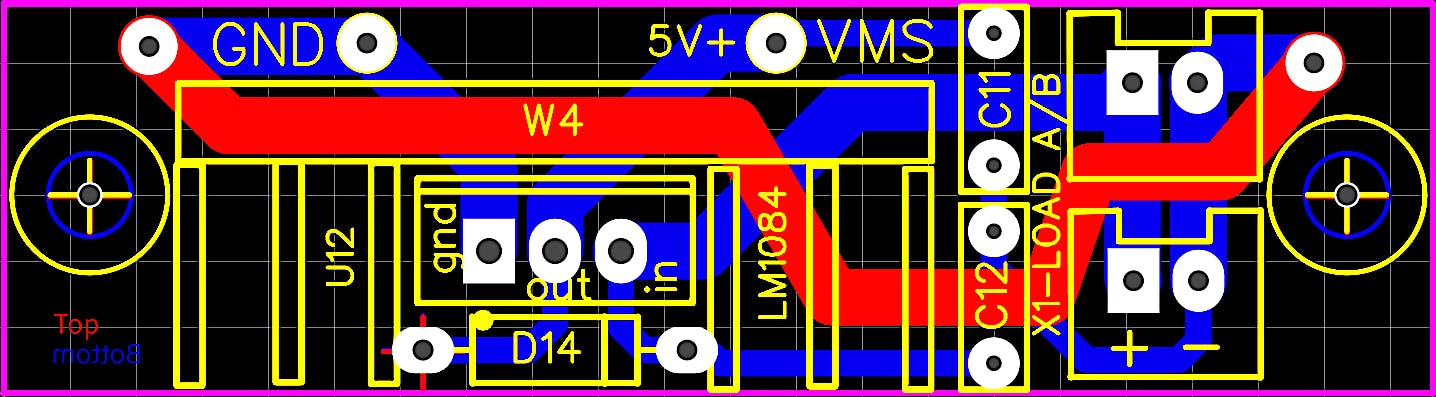
Stepalim 电路概述

Stepalim 组件列表
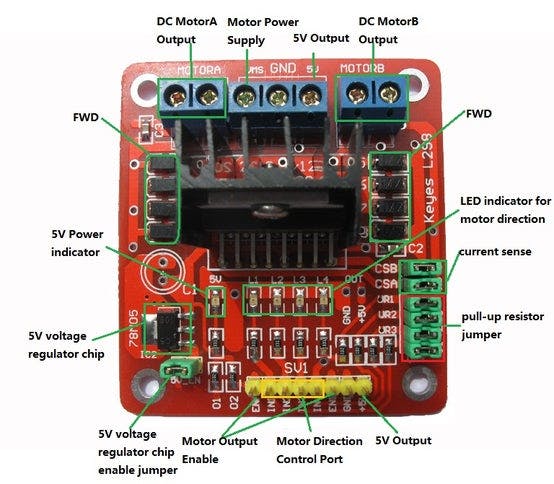
L298步进驱动电路
设置参数设置:
- 间隔:即400mSec,是一次校正尝试和另一次校正尝试之间的时间,从“H”航向和“R”路线,由步进电机移动舵杆完成;该参数对PID也有影响;
- 最小值:即 4°,是偏离其下方路径的度数,步进电机不执行任何操作,因此忽略小的变化;
- Max:即40°,是步进电机可以移动的最大值,以度为单位;如果计算表明移动应该是 45° 或更大,那么无论如何我们选择的值都是 40°;请注意移动组合参数Speed Out和Speed Back的总时间必须小于Interval以避免 MPU 满忙而让Watchdog重置它;
- Speed Out:是在校正尝试期间步进电机的速度,以每秒步数为单位,即 20;
- Speed Back:是步进电机的速度,以每秒步数(即 5)为单位,在校正尝试后收回舵杆(位置 0);
- 科夫。“P”:为PID算法的比例系数,即1;
- 科夫。“I”:为PID算法的积分系数,即0.20;
- 科夫。“D”:为PID算法的微分系数,即0.10;
- 顺时针:步进电机的旋转方向,Direct =顺时针,Reverse =逆时针;
- PWM:是发动机扭矩,因此是步进电机的总电流消耗。1A 的值 = 225,2.2A 左右的值为 255(最大值);
- 时区:与 GMT(格林威治标准时间)相比的 GPS 时间校正;在欧洲,秋季/冬季的太阳时间通常设置为 +1,春季/夏季的法定时间设置为 +2;
流程图:
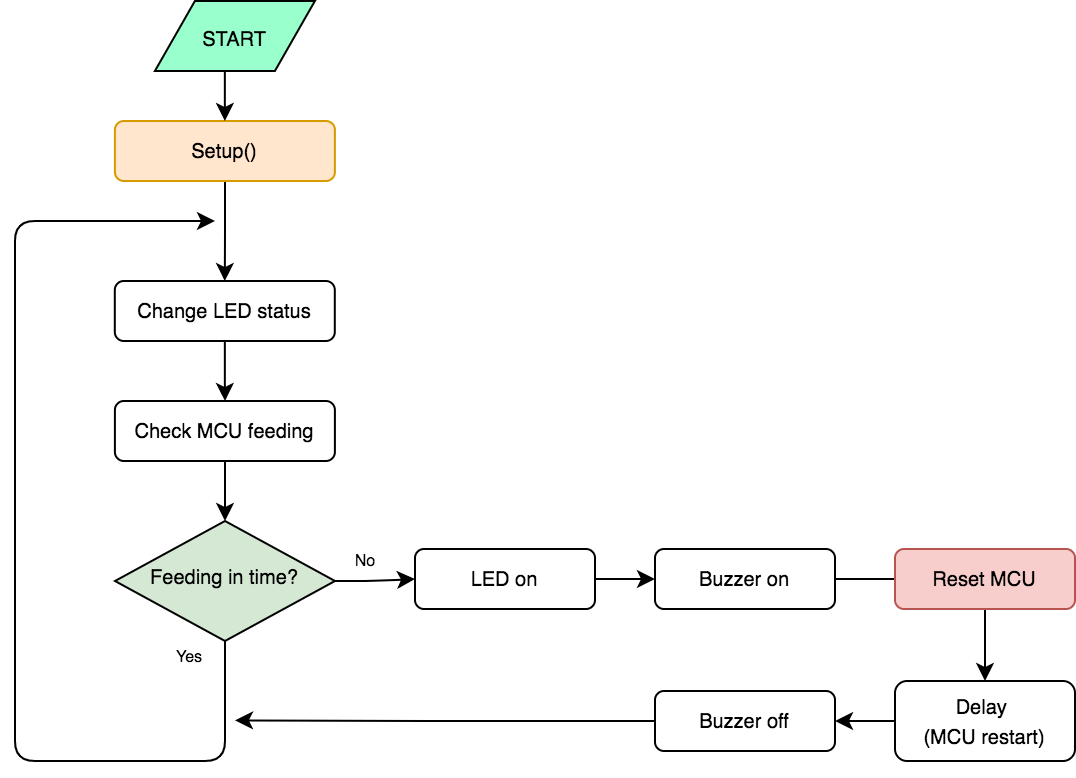
看门狗流程图
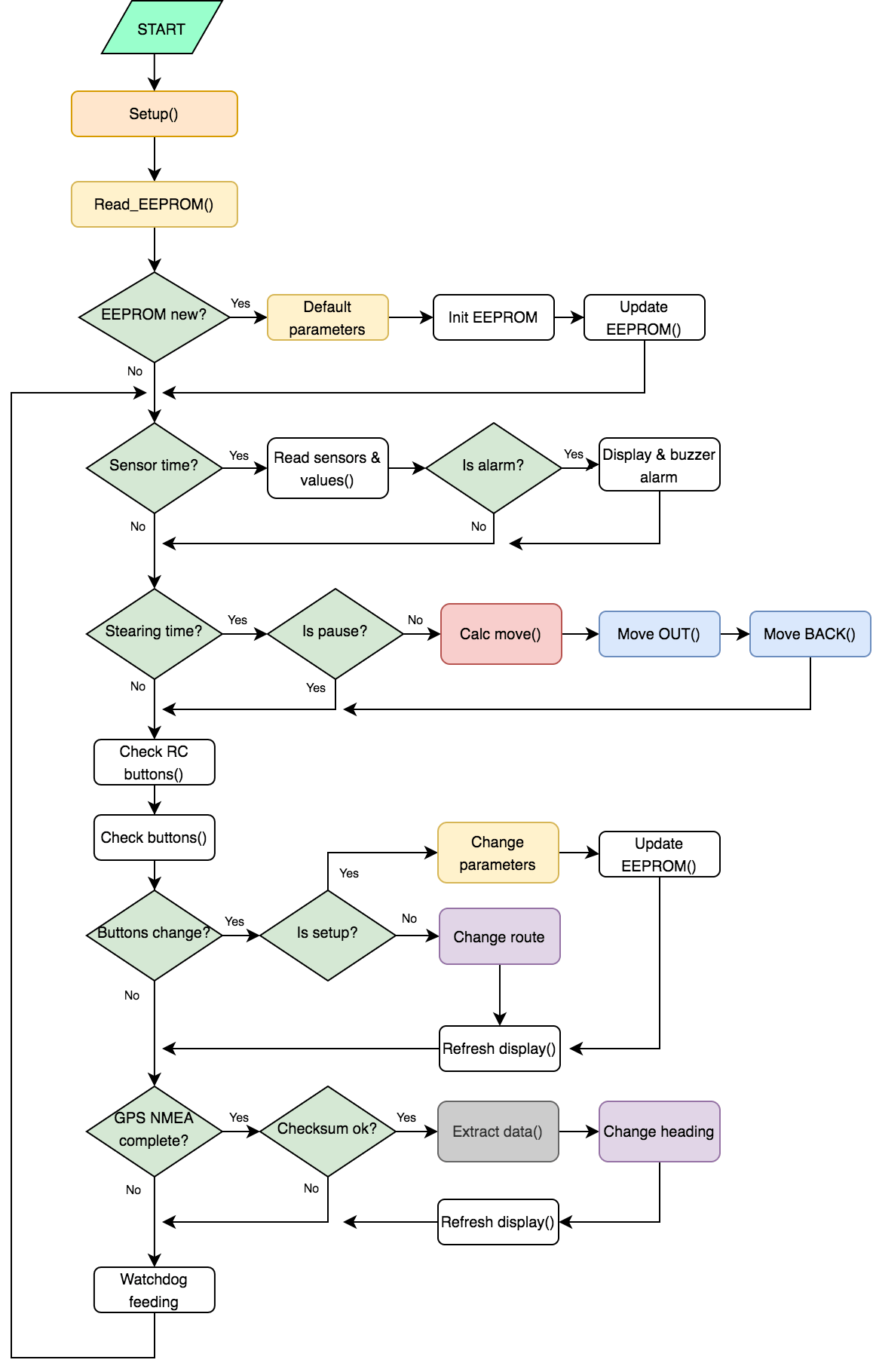
Autopilot2 流程图
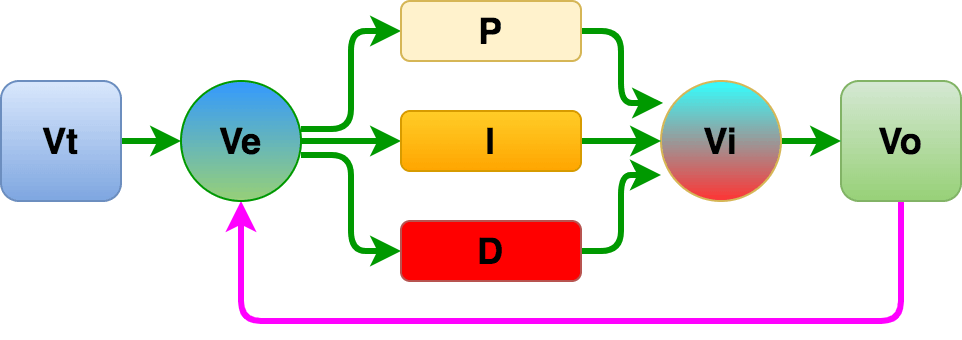
PID 算法会影响步进电机的行为
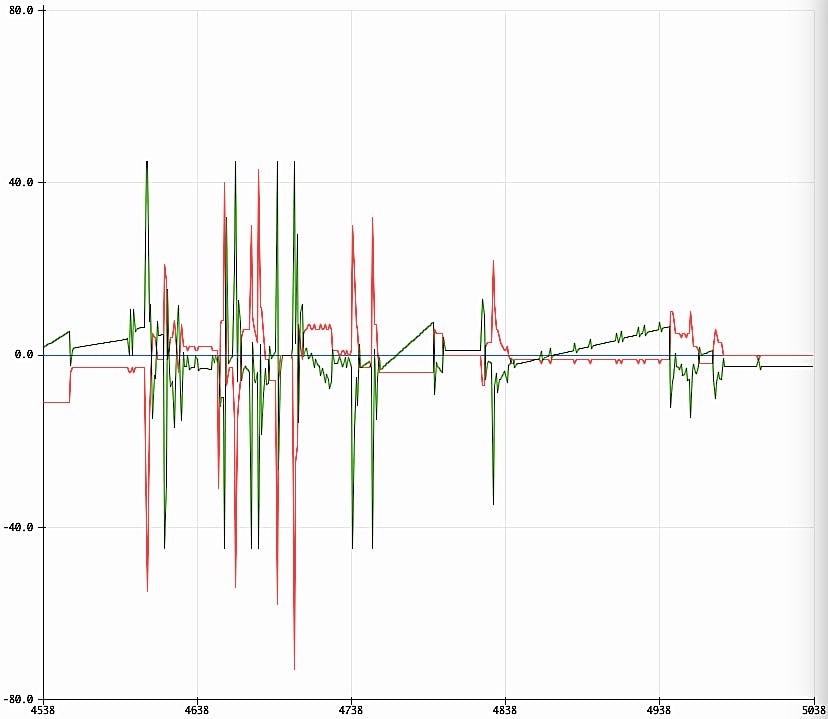
PID 示例图:RED=路由错误,GREEN=修正尝试
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






