
资料下载


如何制作步行机器人
石玉兰
分享资料个
在制作这个项目的过程中,我们试图确保本教程将成为您的最佳指南,以便在您制作自己的机器人时为您提供帮助,因此我们希望本教程包含所需的文档。
在获得我们从JLCPCB订购的定制 PCB 以改善我们电子设备的外观后,这个项目非常方便,并且本指南中有足够的文档和代码来帮助您创建漂亮的机器人。
我们只用了 5 天就完成了这个项目,只需两天时间就可以得到机器人 3D 打印零件所需的所有电子元件,然后再用两天时间完成硬件制造和组装,然后再用一天时间准备适合我们的代码项目,我们已经开始测试和调整。
您将从本教程中学到什么:
- 根据其功能选择组件。
- 了解机器人机制。
- 准备电路图以连接所有选择的组件。
- 将电子部件焊接到 PCB 上。
- 组装所有项目部件(机器人本体)。
- 开始第一个测试并验证项目。
第 1 步:这个机器人是如何工作的!
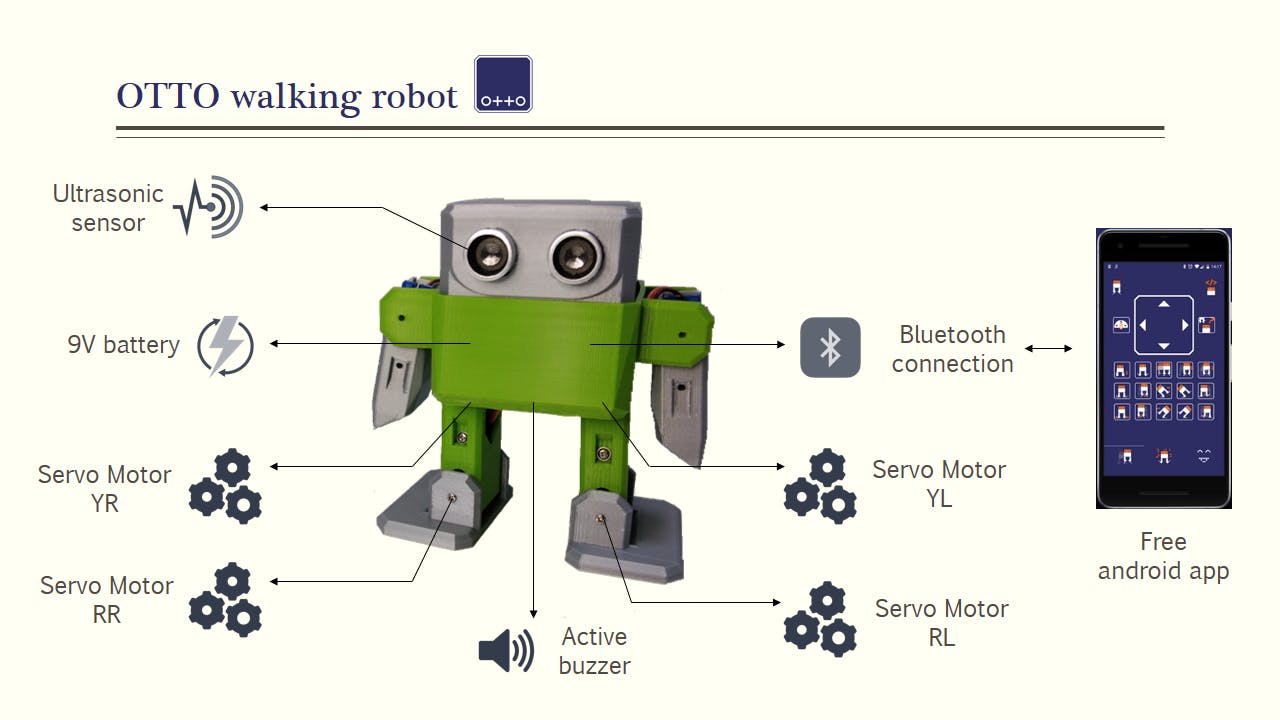
从项目描述开始,正如我已经说过的,我们将复制 OTTO 机器人模型,您可以从OTTO 社区免费获得其 3D 设计零件,但我们将在项目中添加一个定制的 PCB 设计来控制机器人,所以我们将使用 ATmega328 微控制器,而不是像社区为这个项目所做的那样使用整个 Arduino Nano 板。
该机器人具有许多功能,您会喜欢它由4 个伺服电机执行的动作和通过有源蜂鸣器显示的声音,机器人将由一个简单的9V 锂电池供电,并通过一个您可以下载的安卓应用程序由蓝牙模块控制直接从playstore和appstore免费。
机器人运动由 4 个伺服电机执行,因此我们每条腿有 2 个伺服系统,还有升级版的 OTTO 机器人也可以控制手部运动,但我们不会在这个难懂的情况下这样做,我们将升级控制板在我们即将到来的教程中完成这项任务。
第 2 步:电路图
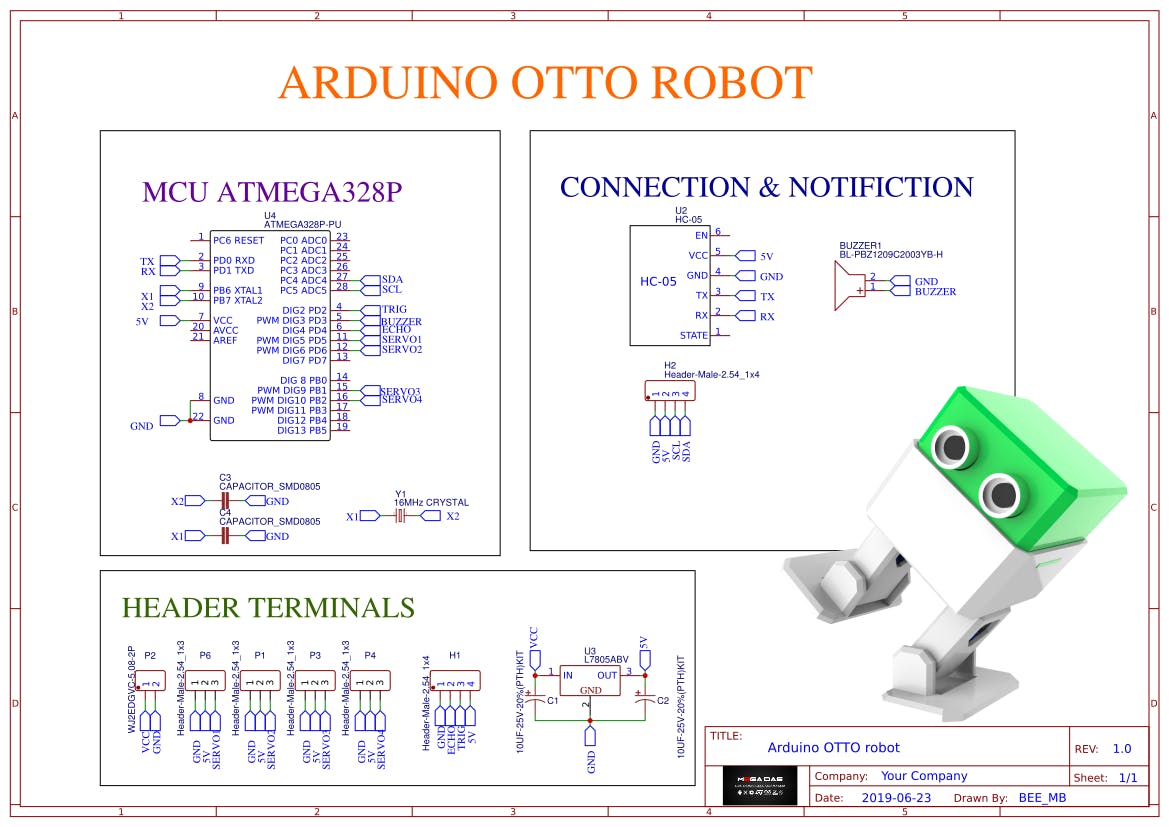
为了将所有电子元件聚集在一起,我选择为这个项目创建自己的 PCB 设计并从JLCPCB生产它,我转移到easyEDA平台,在那里我准备了以下电路图,你可以看到我们需要的所有元件,然后我将电路设计转换为具有所需尺寸以适合机器人底盘的 PCB 设计。
第 3 步:PCB 制作
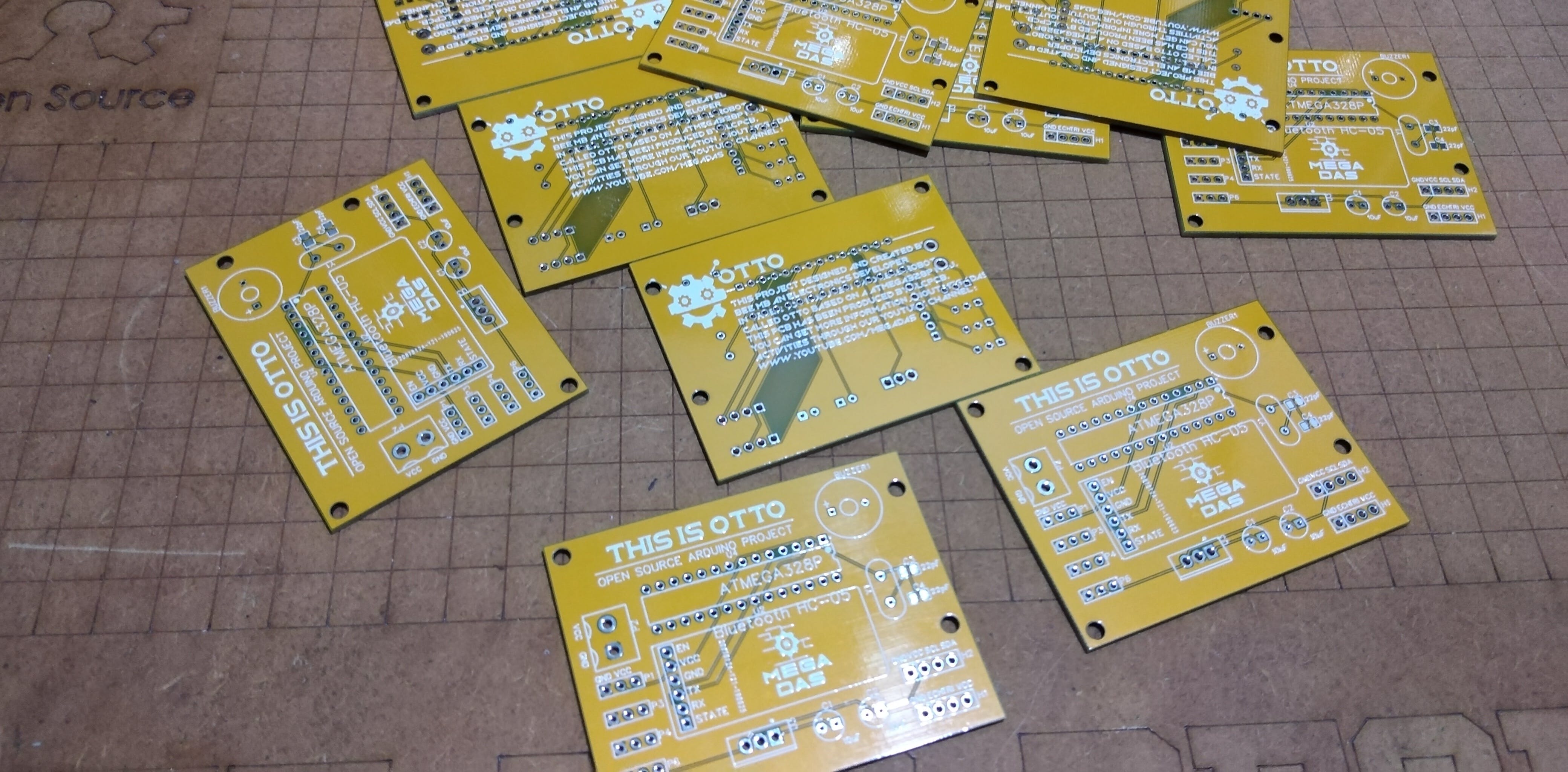
准备好电路后,我将其转换为定制的 PCB 设计,具有所需的尺寸和形状以适合我们的机器人底盘。下一步是生成 PCB 设计的 GERBER 文件并将其上传到JLCPCB订单页面以生产我们的 PCB。
等待多氯联苯的四天,我们到了。这是我们第一次为 PCB 尝试黄色,它看起来真的很棒。
第 4 步:机器人身体 3D 打印部件
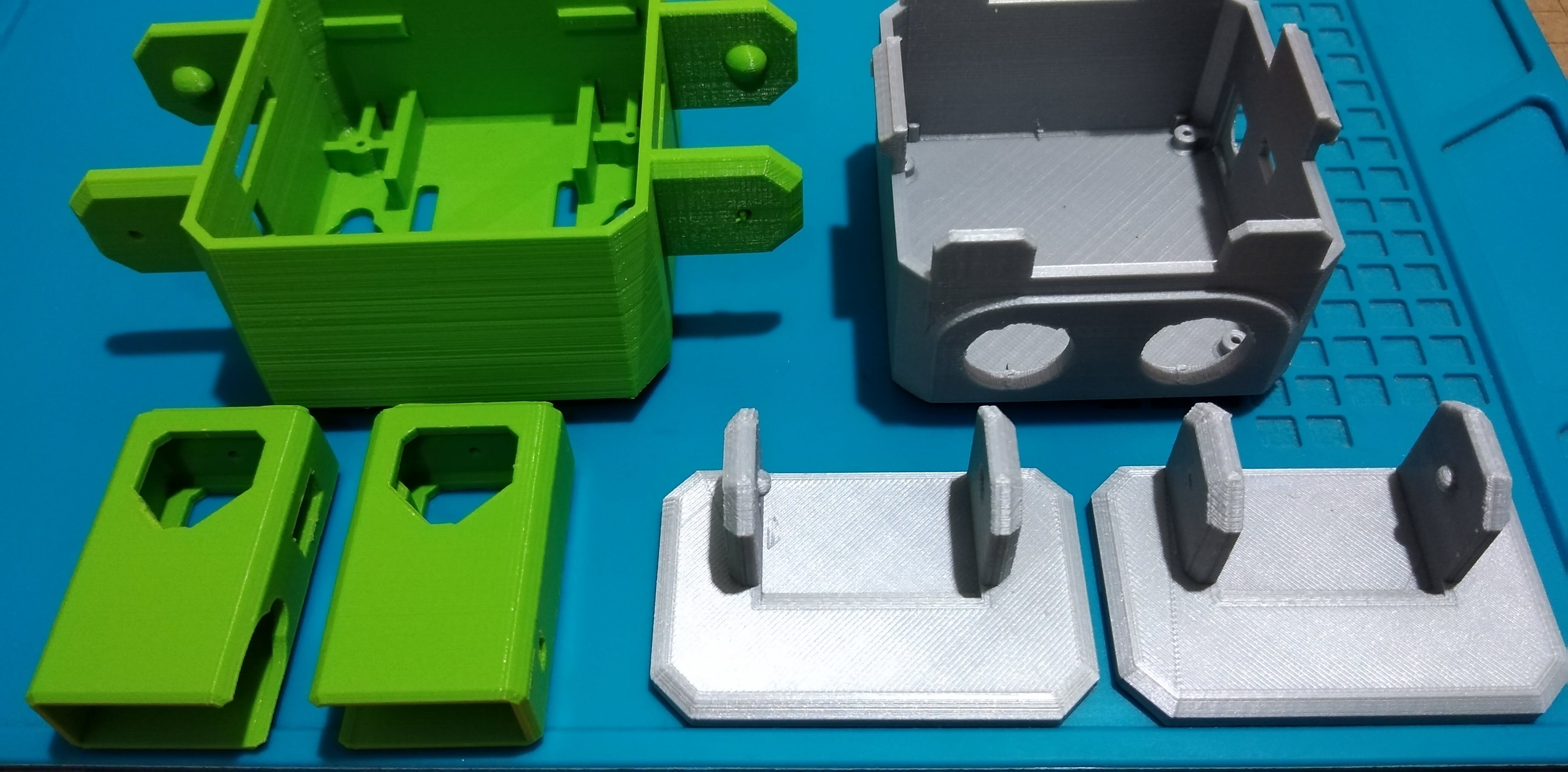
转到机器人身体部位,正如我在演示文稿中已经提到的,您可以通过此链接从 OTTO 社区网站获得该机器人的 STL 文件,以便通过 3D 打印机生产这些部件。
第 5 步:电子成分
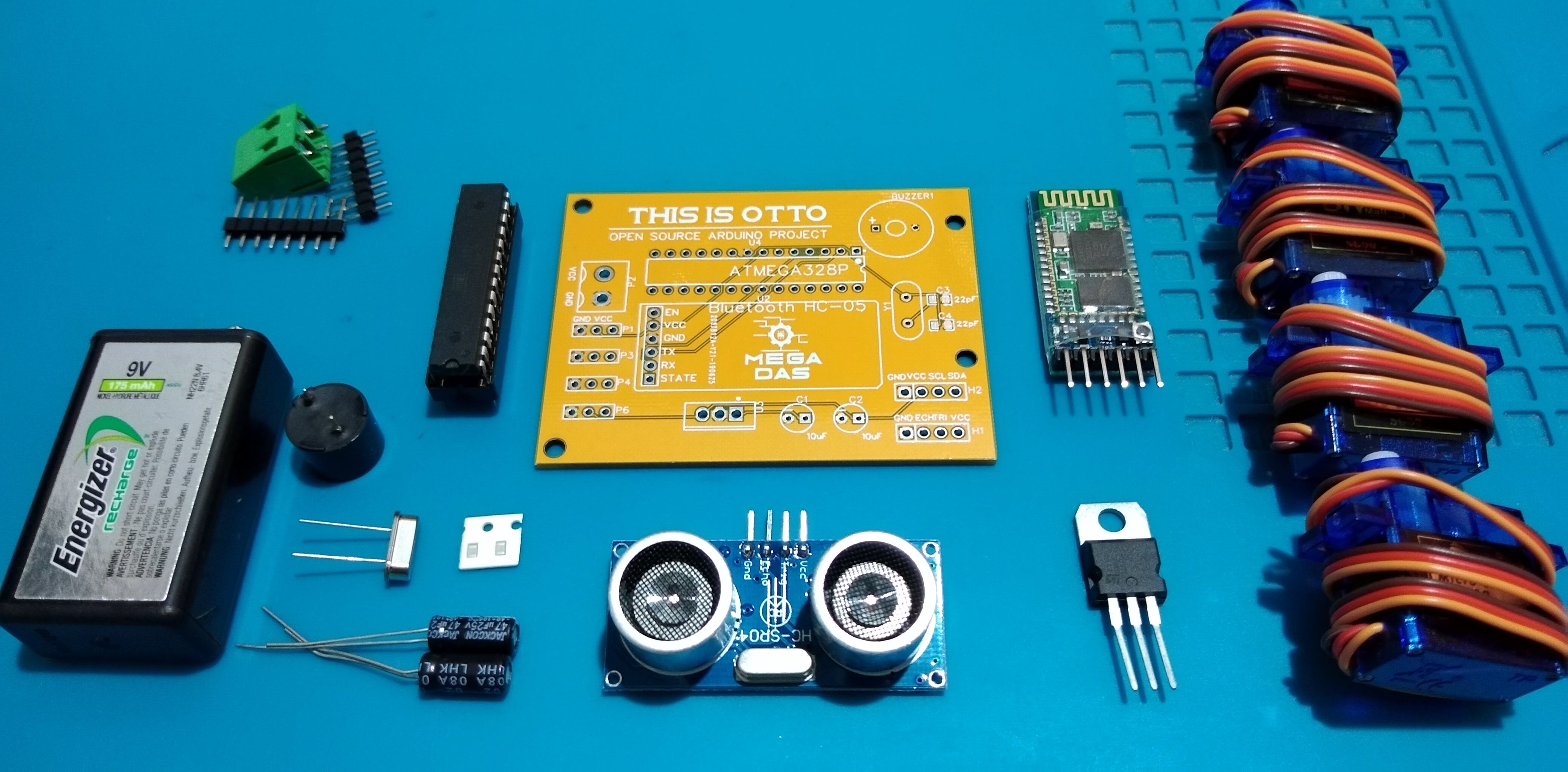
现在我们已经准备好了一切,让我们回顾一下组件列表:
★☆★ 必要组件(亚马逊链接)★☆★
- 我们从 JLCPCB 订购的 PCB
- ATmega328 微控制器:https://www.amazon.com/gp/product/B07PZWYW2F/ref=...
- HC-05 蓝牙模块:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 超声波传感器:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 4 个伺服电机:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 22pF 电容:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 10uF 电容:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 振荡器:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- L7805 电压调节器:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 蜂鸣器:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 9V 电池:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
- 接头连接器:https://www.amazon.com/gp/product/B01G9KSAF6/ref=...
第 6 步:软件部分
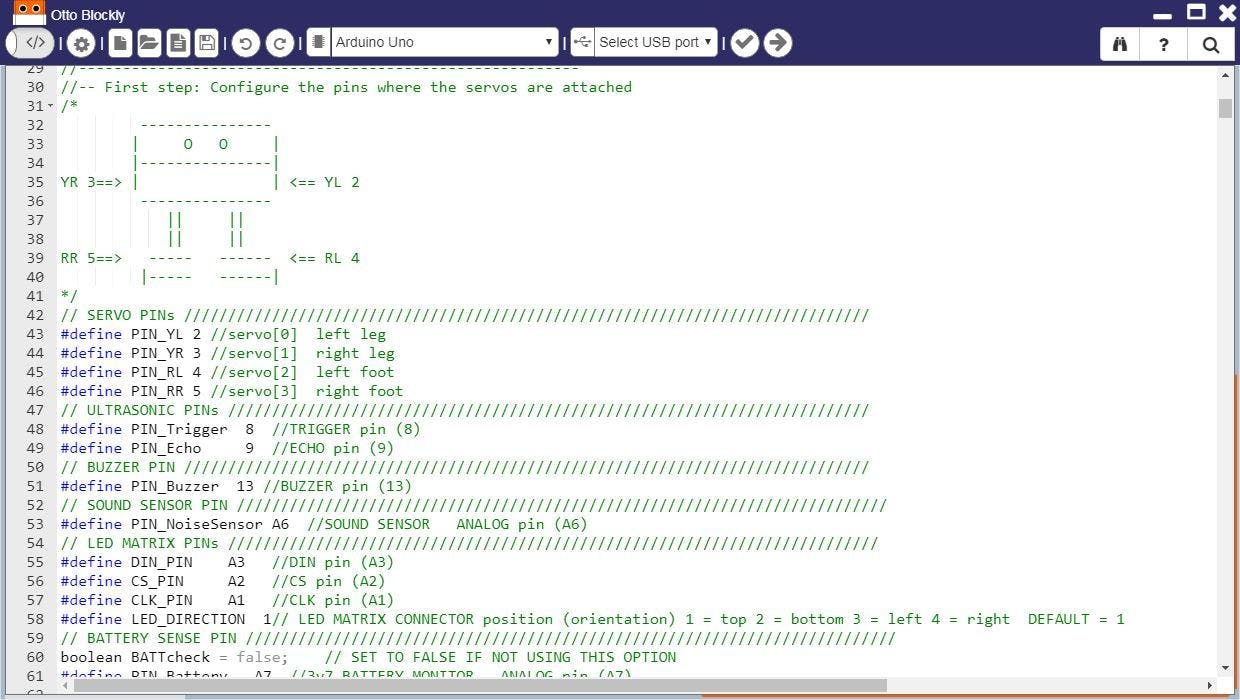
现在我们需要将机器人代码上传到微控制器,因此我们需要Arduino Uno板来执行此操作,关于机器人软件,您可以使用 Arduino IDE 上传代码,或者您可以简单地下载 OTTO blockly IDE ,这将为您提供帮助通过一些示例开始为机器人制作您自己的程序,在我们的例子中,我们将上传社区提供的此代码,此代码允许我从 android 应用程序访问所有机器人功能。
您可以从此链接获得最新更新版本,或者您可以简单地下载以下与我们在项目中使用的代码版本 9 相关的附件。
第 7 步:电子组装
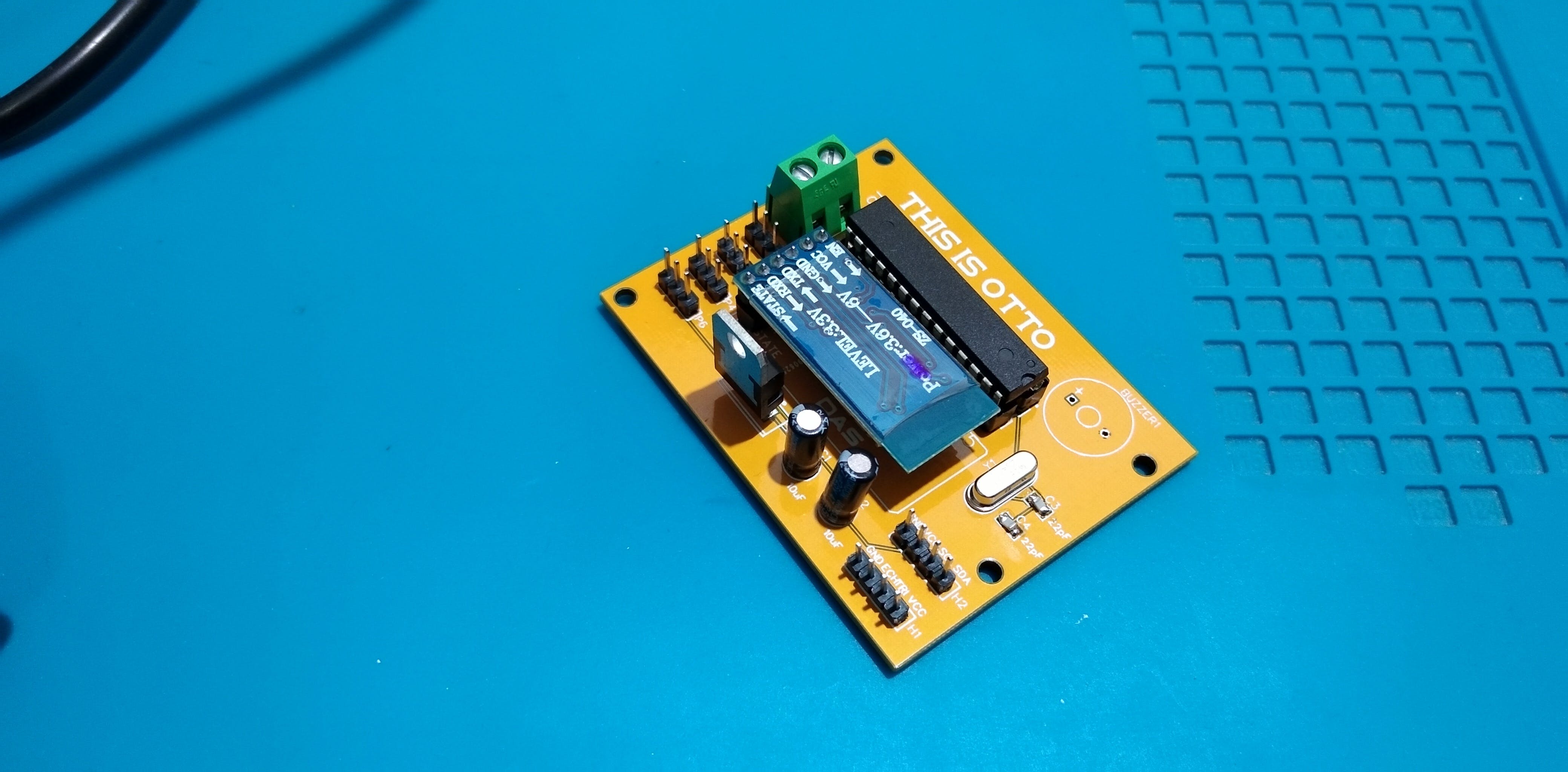
我们准备好电子部件,让我们开始将电子部件焊接到 PCB 上。
正如您从图片中看到的那样,使用此 PCB 非常容易,因为它的制造质量非常高,并且不会忘记在焊接每个组件时会指导您的标签,因为您会在顶部丝绸层上找到每个组件的标签,指示它放置在板上,这样您将 100% 确定您不会犯任何焊接错误。
我已将每个组件焊接到其位置,关于此 PCB,它是一个两层 PCB,这意味着您可以使用它的两面来焊接您的电子组件。
第 8 步:机器人车身组装和演示

在开始组装之前,我建议您将所有伺服电机校准到 90°角,只需使用基本的 Arduino 伺服演示即可。
组装就是再简单不过了:
- 拿起机器人主体和两个伺服电机,从顶部拧紧它们。
- 然后将腿连接到组装好的伺服系统以控制腿的运动。
- 下一步是将另外两个伺服器连接到腿上,并将脚部连接到伺服器上,这样每条腿都有一个伺服器,每只脚都有一个伺服器。
- 下一部分是我们将把它放在机器人头部的超声波传感器。
- 最后一步是将超声波传感器连接到其连接器,并将伺服系统连接到 PCB。
您可以参考代码,您可以在其中找到每个伺服的适当符号,并且您会在我们制作的 PCB 顶部找到相同的标签。
连接电池后,我们将头部连接到身体上,我们可以开始玩我们的机器人了。
我真的很喜欢这个项目,我希望看到你们生产这种机器人,但在我们的项目中还需要进行一些其他改进,以使其更加黄油,这就是为什么我会等待你的意见来改进它。
最后一件事,确保你每天都在做电子产品。
是 MEGA DAS 的 BEE MB,下次见。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





