
资料下载


开源硬件机器人设计
2223
分享资料个
描述
当你开始你的工程之旅时,你经常会觉得你在大学里学到的材料是不够的。但这不一定是真的。虽然我们学到的东西可能不会让我们成为新的谷歌,但它确实为我们提供了建立我们帝国的基础。
我们经常研究直流电机、操作系统、传感器、不同的模块等。工程师生活中的一个障碍是将理论知识转化为实践知识。除了蹲下来弄脏你的手外,别无他法。
这项工作的目标如下:
1) 开发一种可以减轻人力工作量并确保每个人安全的产品。
2)允许我们以远程方式与机器人通信的应用程序。
3)研究推荐技术并确定它们的局限性,这可能有助于提出一种可以克服现有方法缺点的混合方法。
4)识别用于不同推荐系统性能分析的评估指标。我们打算包括一个功能列表,以帮助一线工作人员以有效和远程的方式履行职责。我们希望在不影响效率的情况下为客户提供最先进的设施。
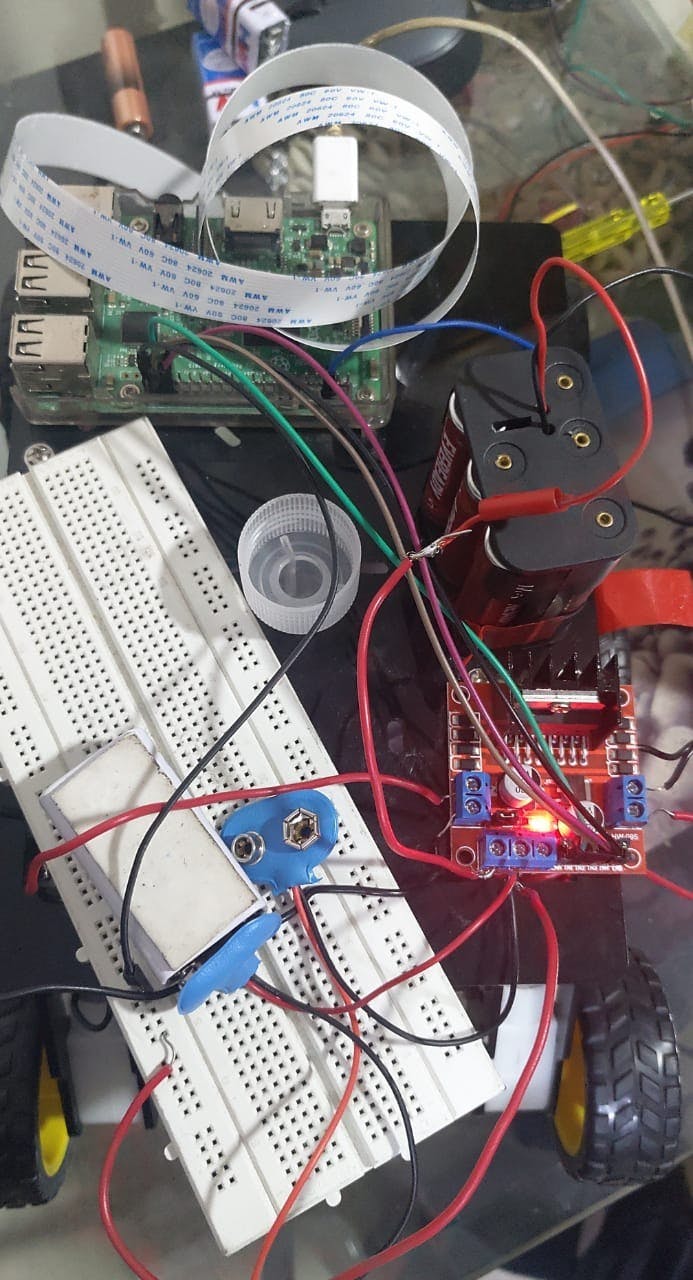
在本博客中,我们使用 6 个直流电机和一个 picam 创建了一个基本的监控机器人。该项目将帮助我们了解基本组件的工作原理以及如何将它们整合到以后可以开发成更大的项目中。
什么是烧瓶?
它是一个用 Python 编写的微型 Web 框架。
- 没有数据库层和表单提取。
- Flask 依赖于 Jinja 模板。
- 它允许您以简单的方式开发 Web 应用程序,并为您提供广泛的工具和库。
- 它对初学者友好,没有样板代码。
REST API
REST-具象状态转移。
- 这是一种使用 HTTP 子集的架构软件风格。
- API 可用于构建和集成软件应用程序。
- 它与计算机系统交互以检索一条特定信息,甚至执行一项功能。
- 它们重量轻且速度快,非常适合基于物联网的项目和应用程序。
允许的 HTTP 方法是:
-
GET / -
POST /accounts -
POST /accounts/login -
GET /accounts/logout -
GET, PUT, DELETE /accounts/ -
GET, POST /accounts//tasks -
GET, PUT, DELETE /accounts//tasks/
项目运作
一、网络实时时钟:
在开发视频通话功能时,我们将使用 WebRTC 和 WebSocket。我们的目标是改善功能和用户体验,因此,我们在模型上安装了麦克风和外部扬声器。WebRTC 是一种 HTML5 规范,用于将媒体与浏览器实时集成。
使用 WebRTC 的优点是不需要任何浏览器插件。但是,要建立会话,您需要一个信令协议。此外,当我们不需要流媒体时,WebSocket 是一个不错的选择。
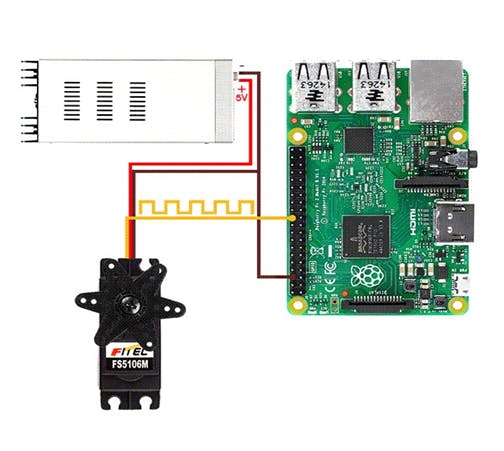
二、伺服电机
Picam 安装在伺服电机上,可以通过网页控制。此功能为机器人提供外围视图,使导航过程更加容易。伺服电机是一种简单的设备,由直流电机、齿轮和基于反馈的位置控制系统组成。伺服电机的主要优点是它能够保持其轴的角位置。我们使用脉冲宽度调制或PWM的理论来控制伺服电机。Picamera 连接到为相机制作的 CSI 端口。
三、直流电机
我们已将 6 个直流电机连接到 1 个电机驱动器,并为其提供 12v 输入。车身左侧的车轮是串联的,车身左侧的车轮也是如此。因此,我们从左侧得到两根线,从右侧得到两根线,然后连接到 H 桥驱动器。为驱动器提供 12 伏电源,该驱动器也连接到 RPI 3b。轮子根据 RPI 通过 Web 应用程序接收到的信号移动。
了解机器人本体的运动
金属底盘配有 6 个直流电机和车轮。整个左侧是串联的,右侧也是如此。因此,我们从每一侧得到两根电线。
该机器人被编程为向 4 个方向移动:
a) 向前 - 向前移动机器人,所有 6 个轮子(左右)都输入高电平。
b) 向后 - 向后移动机器人,所有 6 个轮子(左右)都输入高电平。
c) 左 - 要向左移动身体,左轮为 LOW,而右轮输入为 HIGH。这使身体向左转。
d) 右 - 为了使身体向右移动,右轮为低,而左轮输入为高。这使身体转向正确的方向。
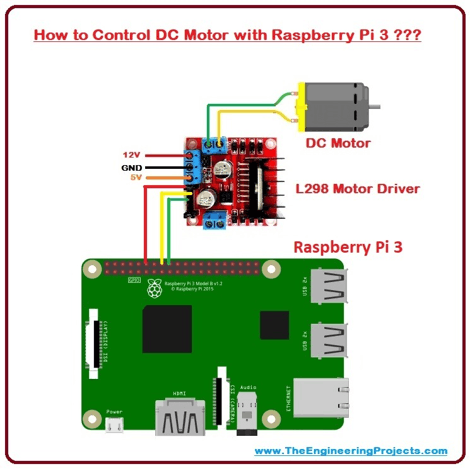
四。双H桥L298N
驱动器模块是一种大功率电机驱动器,可与直流电机和步进电机一起使用。它可以控制电机的方向和速度。
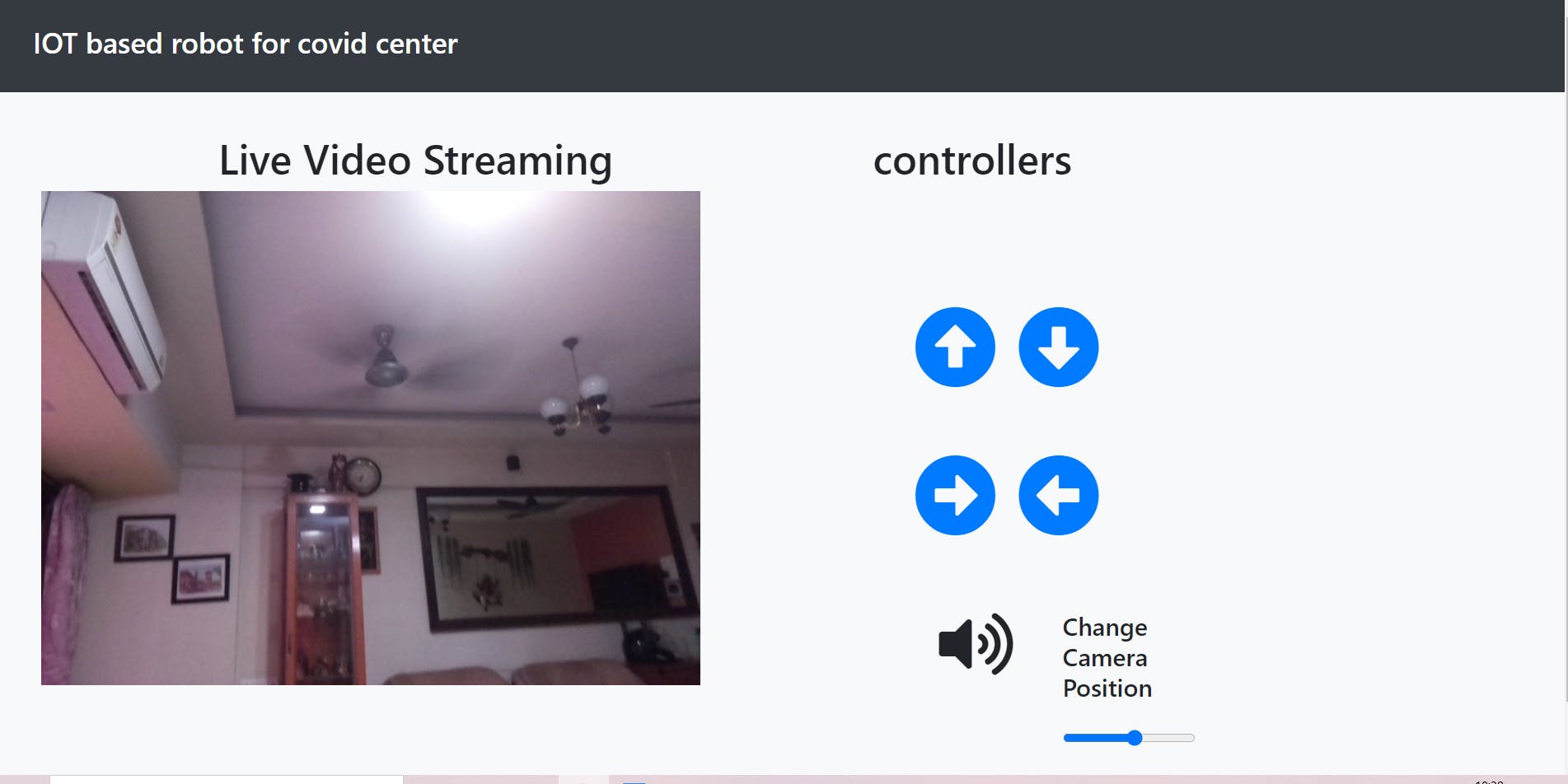
Picam 的运动
Picam 安装在伺服电机上,可以通过网页控制。此功能为机器人提供外围视图,使导航过程更加容易。
应用
1. 通过视频电话咨询医生和医务人员。
2. 引导机器人穿越无法物理存在的地形/环境。
3.音频广播消息
4. 相机周边视图
结论
该论文提出了一个模型来对抗和减少病毒的影响。该项目的目的是帮助一线工作人员并确保患者护理保持良好状态。在这场大流行中,最重要的安全措施是保持社交距离以及适当的消毒。然而,由于缺乏监测这些安全措施的现有技术方法,人工干预变得必要。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




